

Terminal sliding mode control method of RBF neural network applying intelligent vehicle longitudinal speed control
A longitudinal speed and intelligent vehicle technology, applied in the direction of control devices, etc., can solve problems such as chattering, complex models, and slow response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The specific embodiments of the present invention will be described in detail below in conjunction with the technical solutions and accompanying drawings.
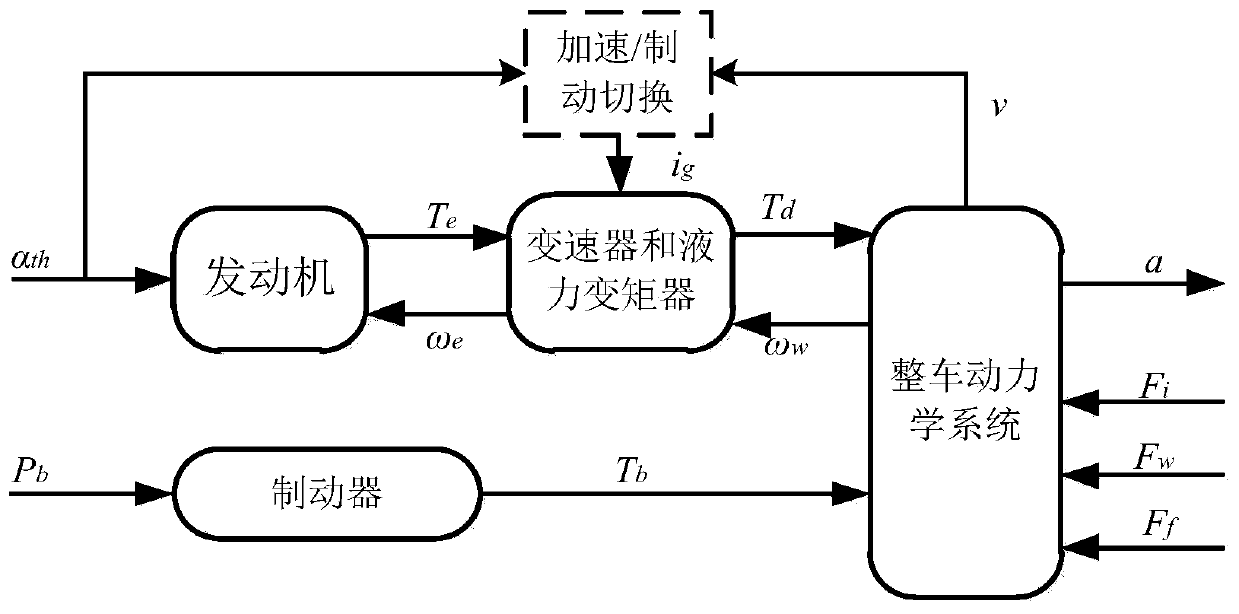
[0080] Such as figure 1 As shown, the present invention needs to establish a dynamic model of the longitudinal motion characteristics of the intelligent vehicle.
[0081] Step 1: Establish a nonlinear longitudinal motion mathematical model describing the characteristics of the intelligent vehicle through computer simulation, including engine model, torque converter and automatic transmission model, braking system model and vehicle longitudinal motion model.
[0082] Step 1.1: Establish the longitudinal dynamics model of the intelligent vehicle, which mainly includes the engine model, torque converter and automatic transmission model, braking system model and vehicle longitudinal motion model, as follows:
[0083] Engine model:
[0084]
[0085]
[0086] Torque converter and automatic transmission model:
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More