

An exoskeleton upper limb rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve the problems of poor comfort, achieve compact structure, improve use safety, and reduce energy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the embodiments, technical solutions and advantages of the present invention more obvious, the technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Obviously, the described embodiments are part of the embodiments of the present invention, not all of them. Example. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
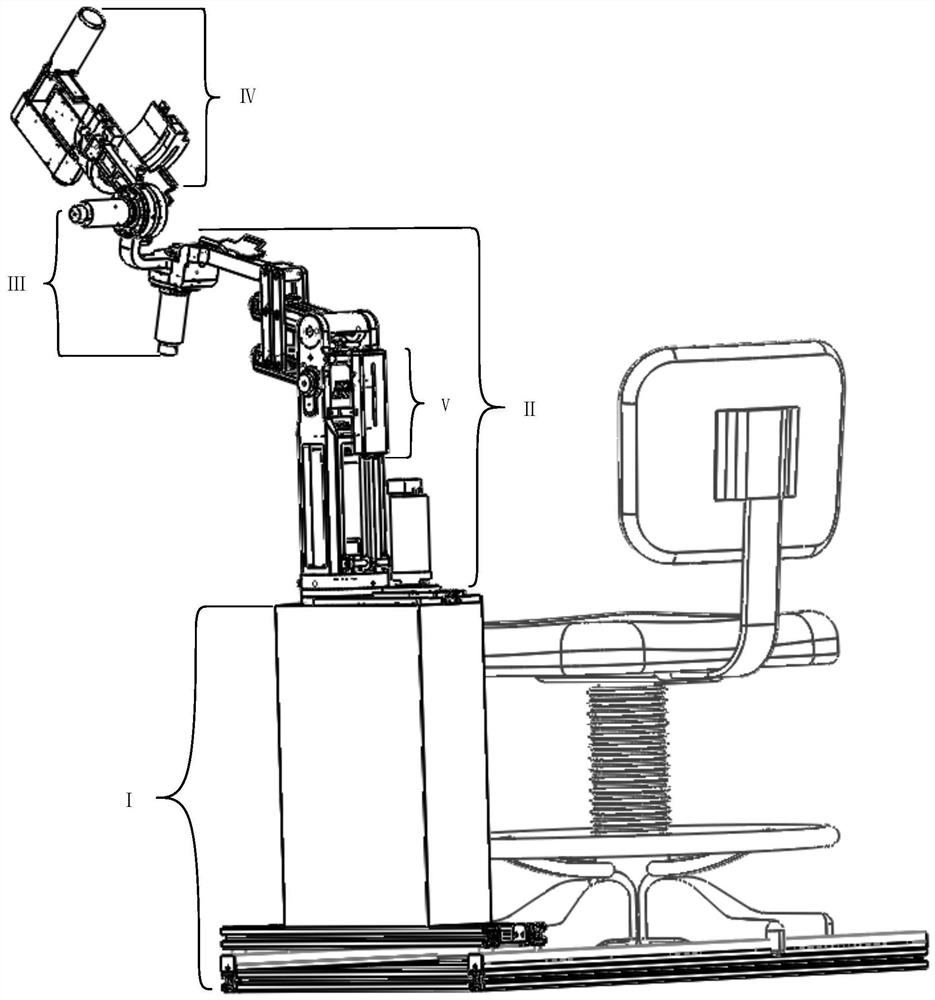
[0034] An exoskeleton type upper limb rehabilitation robot of the present invention comprises a shoulder joint training module, an elbow joint training module, and a wrist joint training module connected in sequence;
[0035] The shoulder joint training module includes a first joint assembly and a second joint assembly, the first joint assembly includes a first power device and a support fram...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More