

Robot path planning and walking control method and system based on serial numbers
A path planning and walking control technology, applied in control/adjustment systems, two-dimensional position/channel control, vehicle position/route/altitude control, etc., which can solve the problem of difficult path planning, high complexity, and less external program intervention. and other problems, to achieve the effect of intervention actions and less data.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
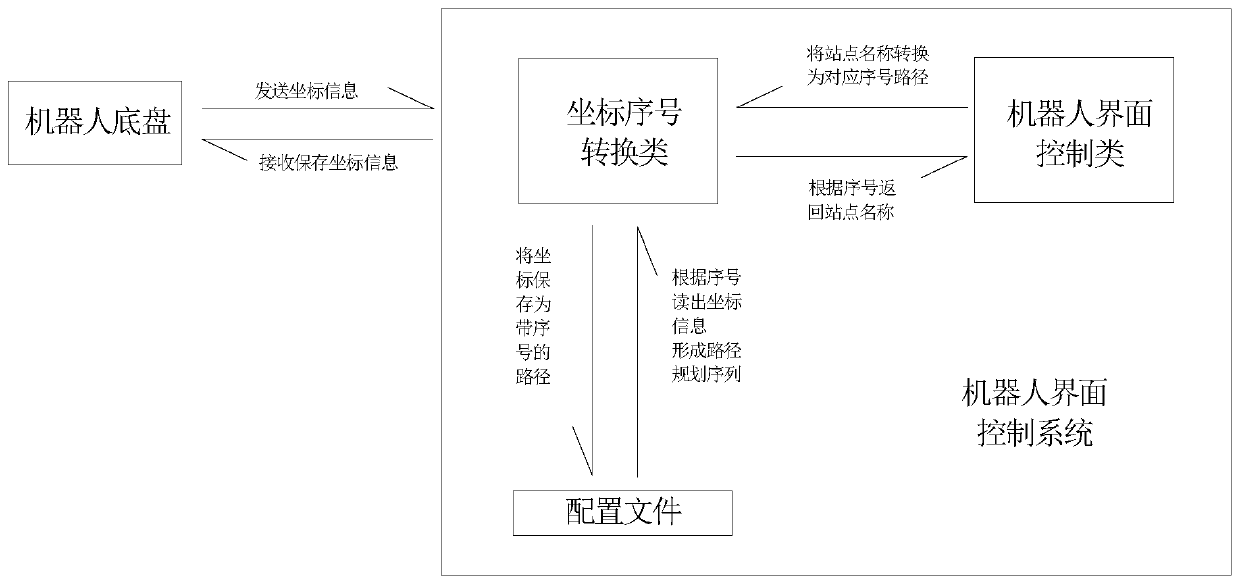
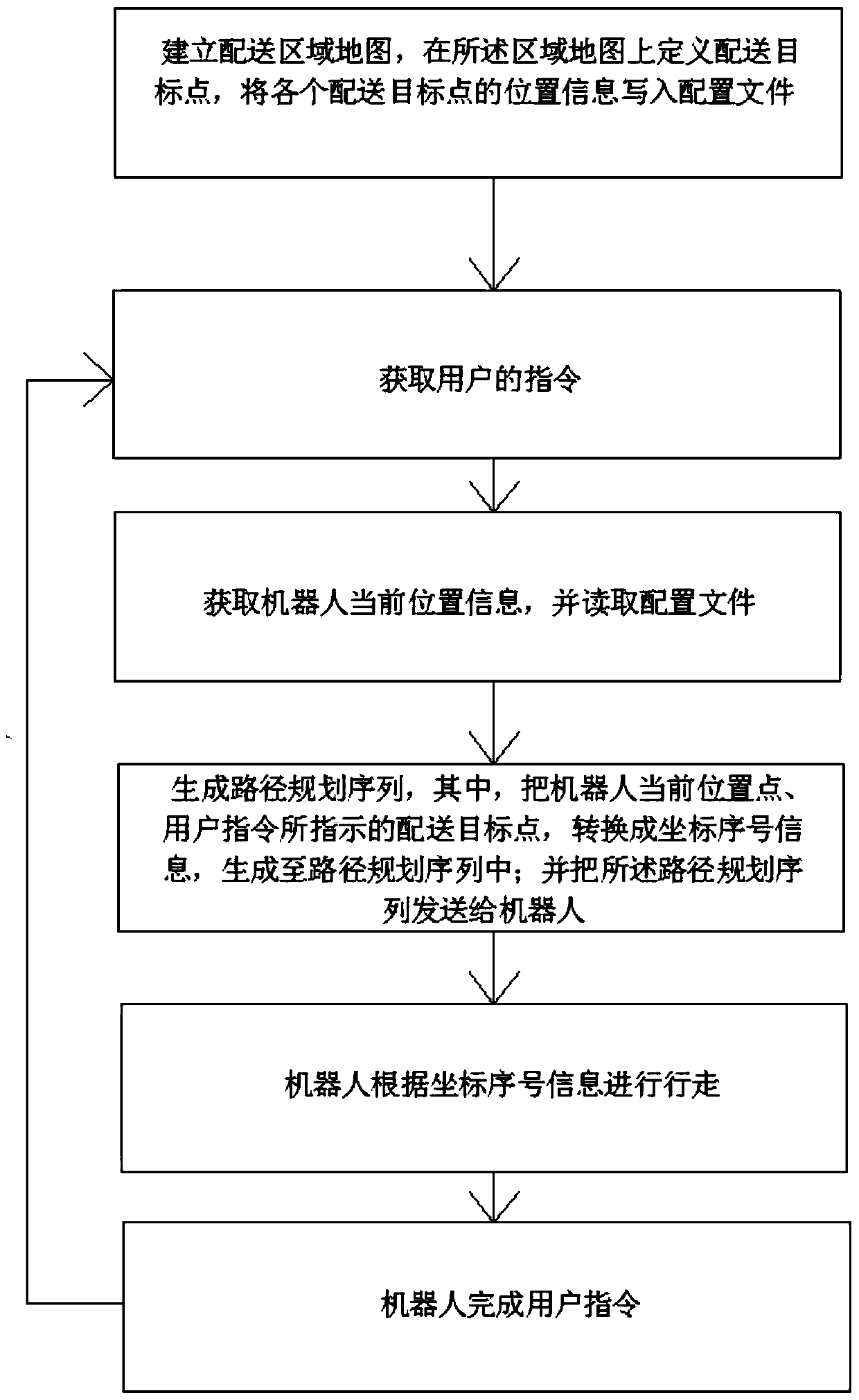
[0035] Such as figure 1 and figure 2 As shown, the present invention relates to a robot path planning and walking control method based on serial numbers, including configuration steps and execution steps, wherein,
[0036] Configuration steps:
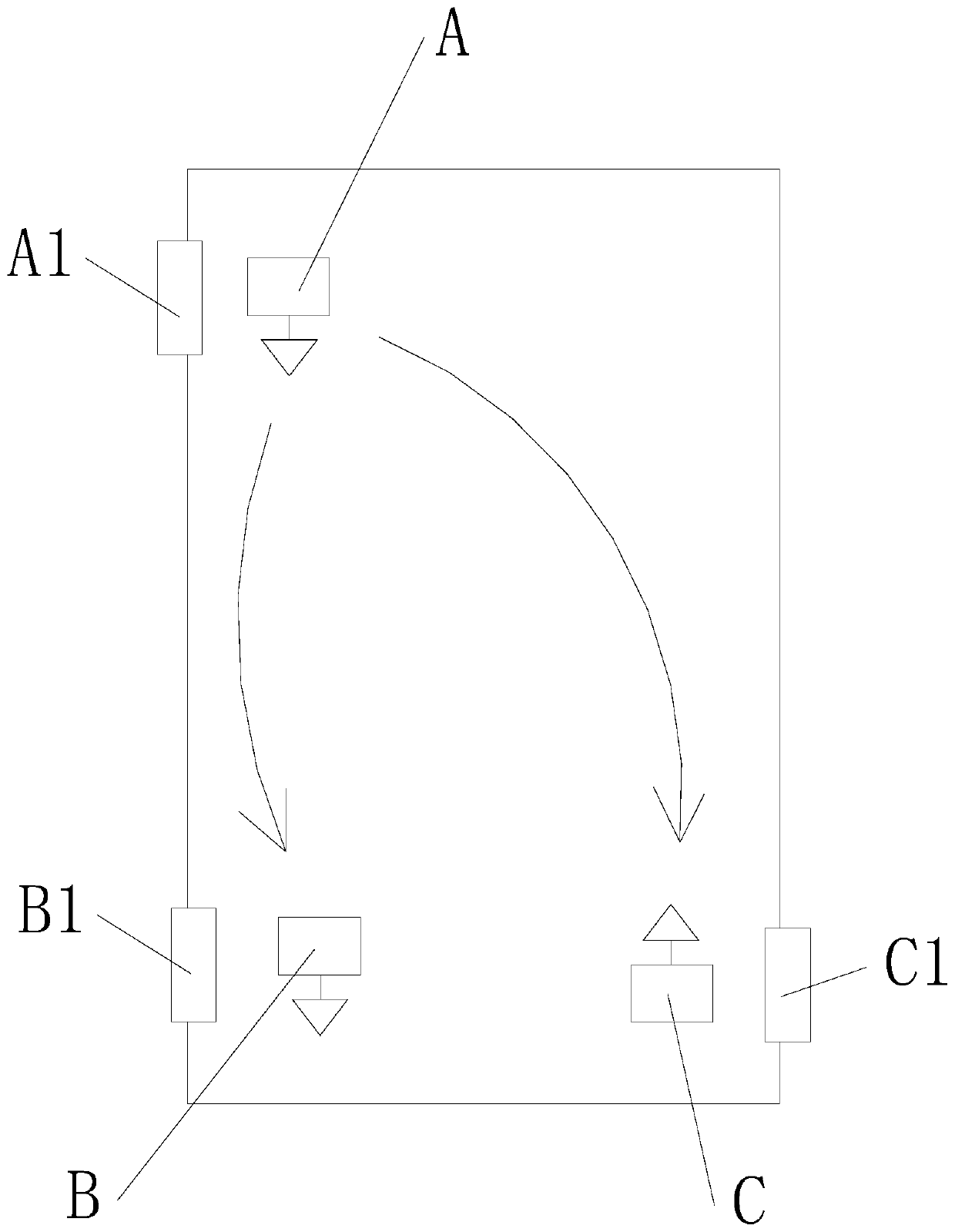
[0037] Create a distribution area map, and define the delivery target points on the area map; take a scene where a certain group of robots are used in the inpatient department of a hospital to take medicine and deliver medicine to patients as an example, first establish a map of the entire hospital, including the terrain of each floor, etc. Write the location information of each distribution target point (such as the medicine collection point, the location of the ward on each floor, the corridor communication location, the elevator door, the charging location, etc., and the points where the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More