

A robot trapped detection method and robot
A robot and detection sensor technology, applied in the field of robots, can solve the problems of reducing user experience and the robot cannot perform operations according to instructions in a timely manner, so as to achieve the effect of improving user experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
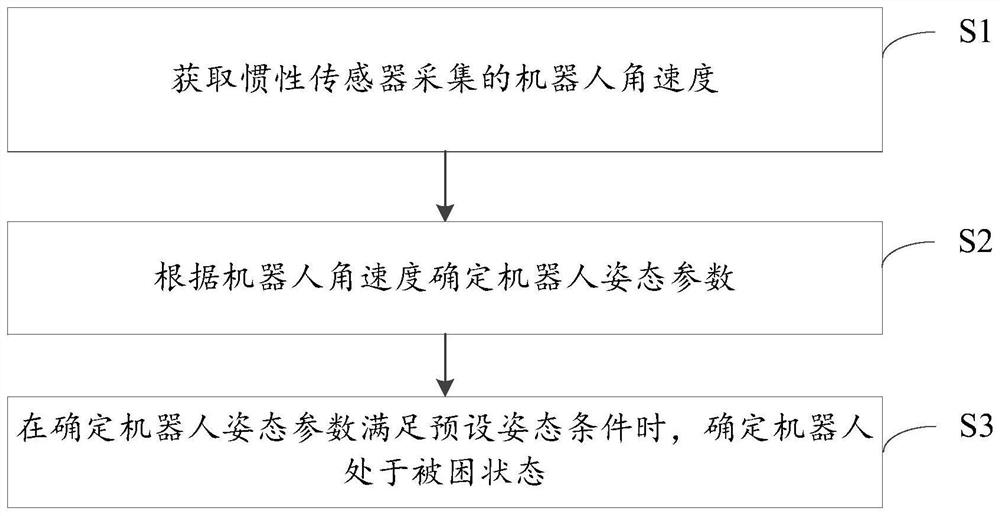
[0079] see figure 1 , which is a flow chart of a method for detecting a trapped robot provided in an embodiment of the present application.
[0080] The robot trapped detection method provided in the embodiment of this application includes S1-S3:
[0081] S1: Obtain the angular velocity of the robot collected by the inertial sensor.
[0082] Inertial sensors are used to detect and measure acceleration, tilt, shock, vibration, rotation, and multi-degree-of-freedom motion, and are important components for solving navigation, orientation, and motion carrier control; moreover, the embodiments of the present application do not limit inertial sensors, for example, inertial sensors It may include an accelerometer (or acceleration sensor) and / or an angular velocity sensor (gyro), may also include an inertial measurement unit (Inertial measurement unit, IMU), and may also include an attitude reference system (Attitude and heading reference system, AHRS).
[0083] The angular velocity...
Embodiment 2
[0114] In addition, because different moving wheels will be subjected to different pressures for a robot in an inclined state, the embodiment of the present application can determine the information of the degree of inclination of the robot according to the pressure on the moving wheels, so that the embodiment of the present application can determine the information of the degree of inclination of the robot based on the degree of inclination information to determine if the robot is trapped. Based on this, the embodiment of the present application also provides another implementation of the method for detecting a trapped robot. In this implementation, the method for detecting a trapped robot includes the following two steps in addition to the above steps:
[0115] Step 1: Obtain the wheel pressure collected by the wheel pressure detection sensor corresponding to the moving wheel.
[0116] The moving wheels are installed on the robot, and the moving wheels are used to realize th...
Embodiment 3
[0124] In addition, the embodiment of the present application may also determine whether the robot is trapped according to the height value of the robot from the ground. Based on this, the embodiment of the present application also provides another implementation of the method for detecting a trapped robot. In this implementation, the method for detecting a trapped robot may not only include the above steps, but also include: obtaining the distance of the robot from the cliff detection sensor. ground height value. At this time, S3 may specifically be: determining that the robot is in a trapped state when it is determined that the attitude parameters of the robot meet the preset attitude conditions and / or the height of the robot meets the preset ground clearance conditions.
[0125] The cliff detection sensor is used to collect the height value of the robot; moreover, the embodiment of the present application does not limit the number and installation position of the cliff dete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More