

Transverse robust fault-tolerant control system and method for four-wheel steering automatic driving automobile
A technology of automatic driving and four-wheel steering, which is applied in the general control system, control/regulation system, adaptive control, etc., and can solve problems such as the uncertainty of the parameters of the lateral dynamics model, the performance impact of the lateral motion control system, and external interference. , to achieve the effect of enhancing the lateral tracking performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The following embodiments will further illustrate the present invention in conjunction with the accompanying drawings.
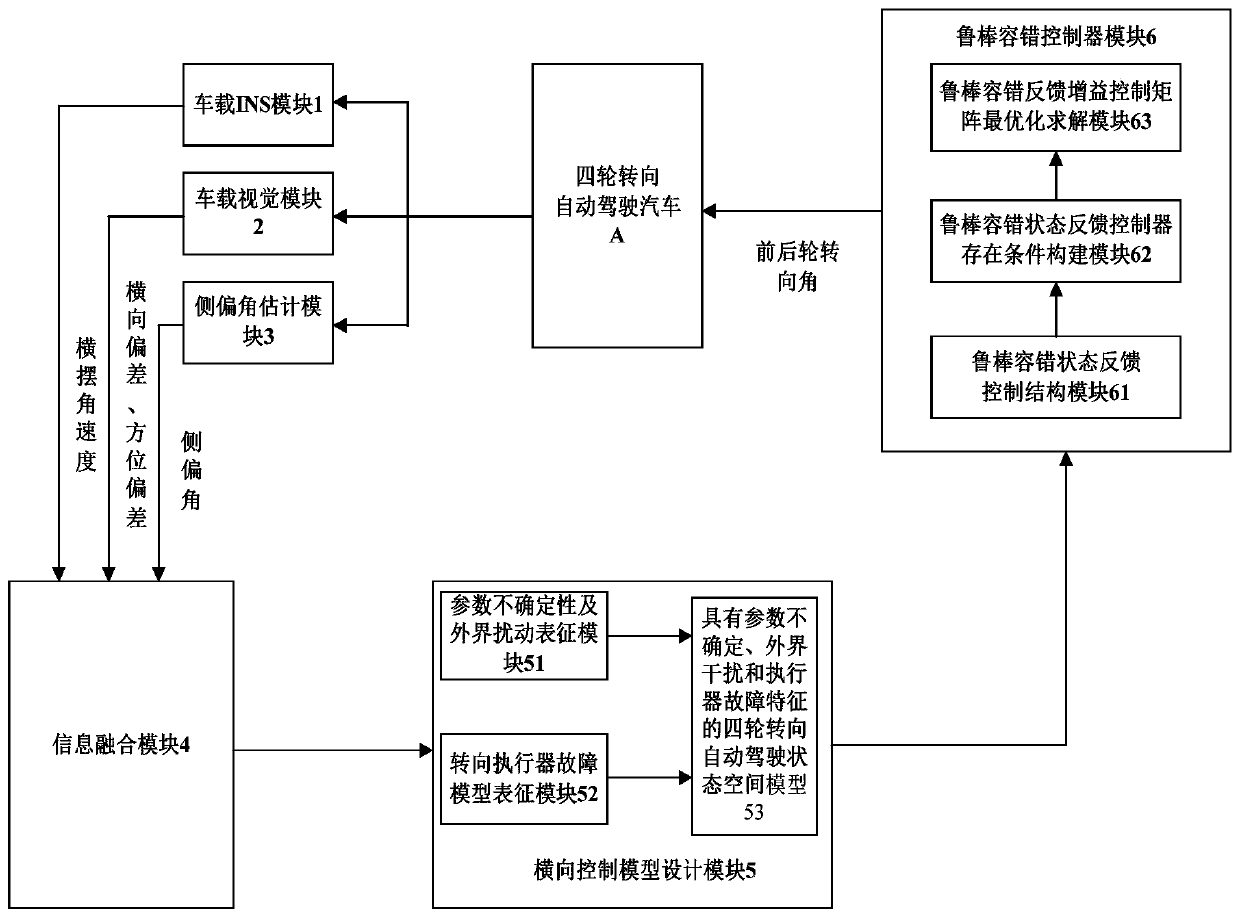
[0037] Such as figure 1 As shown, the lateral robust fault-tolerant control system of the four-wheel steering autonomous vehicle described in the embodiment of the present invention includes a vehicle-mounted INS module 1, a vehicle-mounted vision module 2, a side slip angle estimation module 3, an information fusion module 4, and a lateral control model design module 5 and robust fault-tolerant controller module 6;
[0038]The input terminals of the vehicle-mounted INS module 1, the vehicle-mounted vision module 2 and the side slip angle estimation module 3 are connected to the output terminals of the four-wheel steering automatic driving vehicle A, and the vehicle-mounted vision module 2, the vehicle-mounted INS module 1 and the side slip angle estimation module 3 The output terminal is connected to the input terminal of the information fusion modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More