Mobile robot field positioning system and control method thereof
A positioning system and control method technology, applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problems of unsuitable complex construction sites, insufficient positioning accuracy, high cost, etc. problems, to achieve the effect of easy replacement, low cost, and high-precision positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the examples, and the following examples are only used to illustrate the technical solutions of the present invention more clearly, but not to limit the protection scope of the present invention.
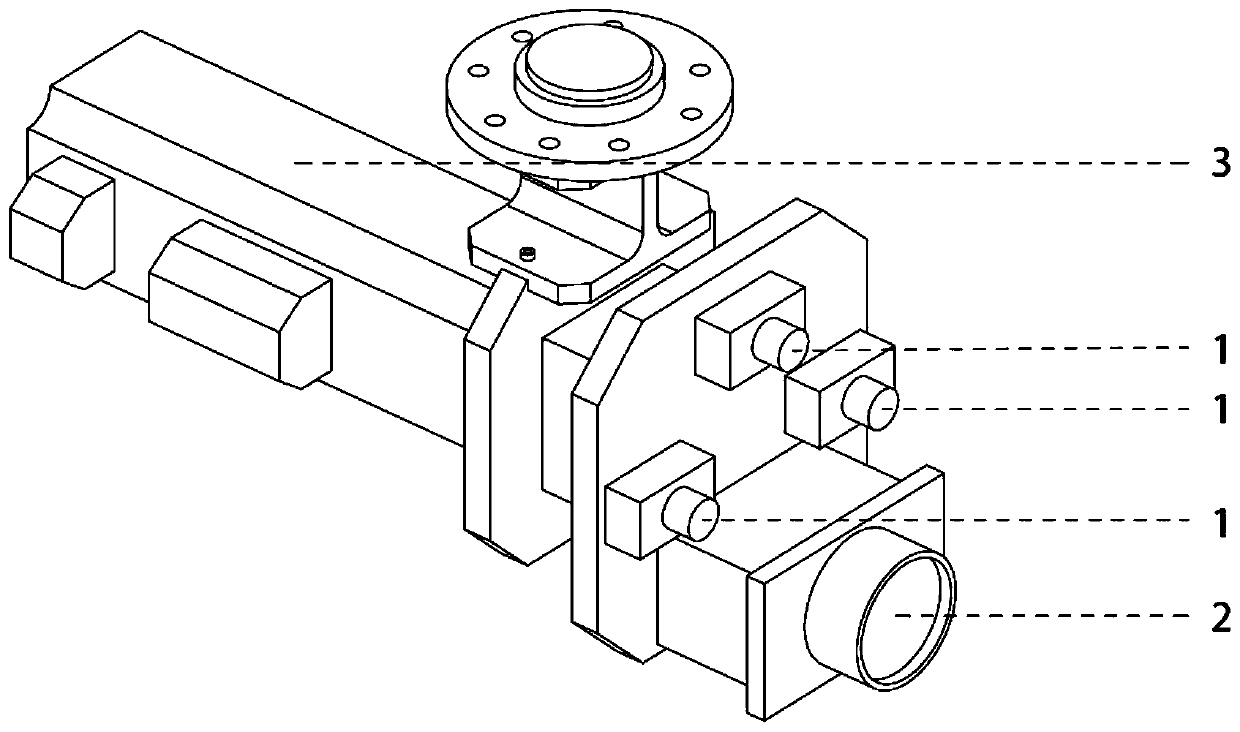
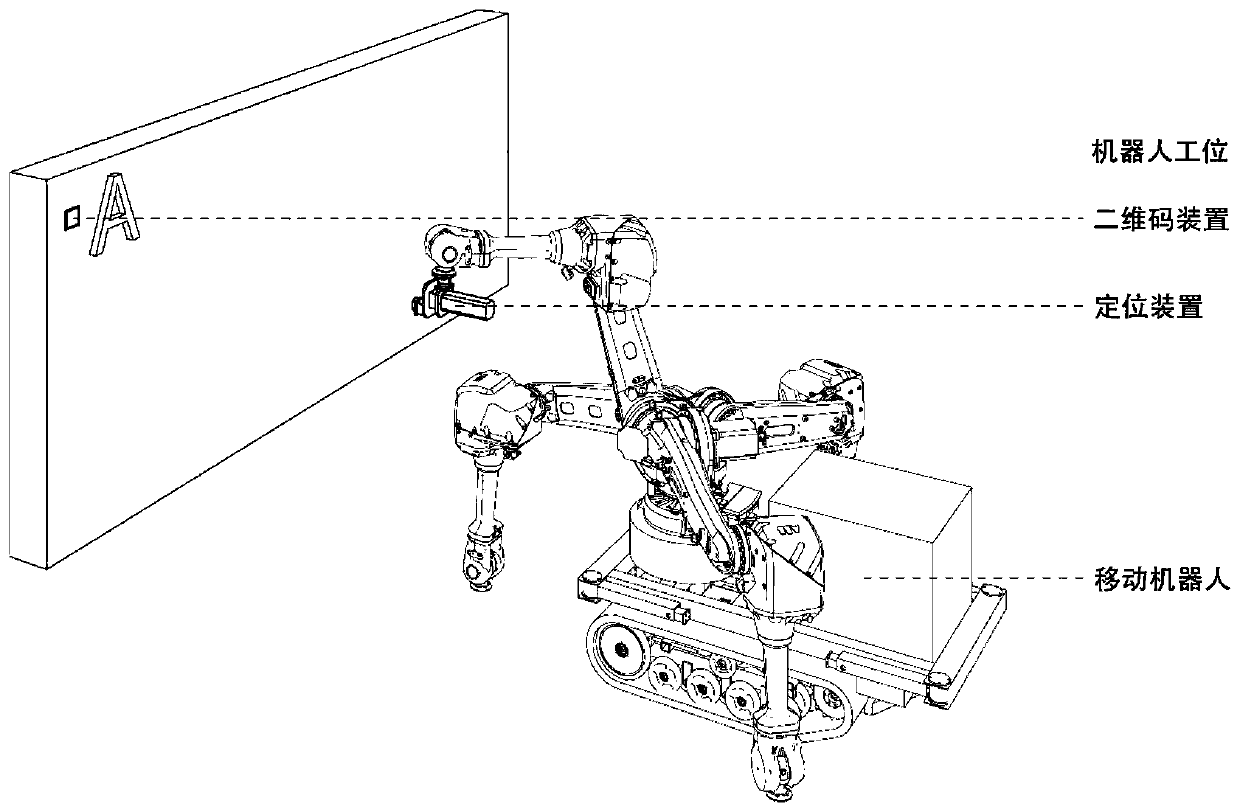
[0028] Such as figure 1 and figure 2 As shown, the present invention provides a mobile robot site positioning system, including a mobile robot body and a robot station. A two-dimensional code device is provided on the robot station, and the two-dimensional code device is located at the upper left of the robot station. Each two-dimensional code contains the spatial coordinates determined by this two-dimensional code and the operation information of the corresponding station. The main body of the mobile robot is provided with a positioning device and a driving module, and the driving module is used to adjust the spatial position and posture of the mobile robot and drive the movement of the robot. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More