

A kind of arc fuse curved surface additive pose modeling method and control method
A technology of modeling method and control method, applied in the field of additive manufacturing, which can solve the problems of pose modeling and its control without patent intellectual property rights or academic research, little research, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
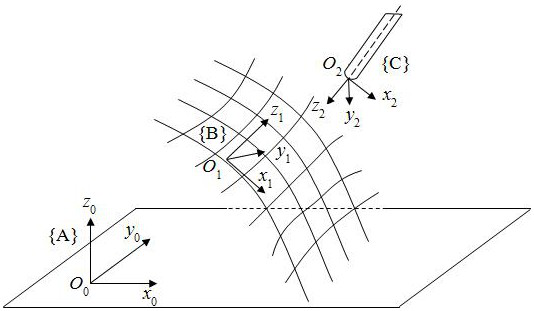
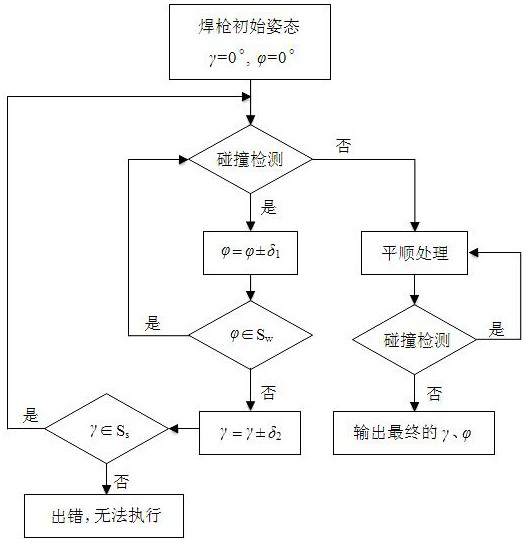
[0097] see figure 1 , an arc fuse surface additive pose modeling method, the modeling method includes the following steps:
[0098] S1. Establish workpiece coordinate system {A}, which is Cartesian coordinate system O 0 x 0 the y 0 z 0 ;
[0099] Among them, O 0 x 0 the y 0 The surface is a horizontal plane, O 0 point position and O 0 x 0 , O 0 the y 0 The direction of the workpiece is determined according to the simplest principle of workpiece positioning (the workpiece is positioned according to the point and direction specified by the user), O 0 z 0 The direction is opposite to the direction of gravity, and the workpiece coordinate system {A} satisfies the conditions of the right-hand rule; preferably, for the convenience of practical operation, O 0 x 0 , O 0 the y 0 The direction of the base coordinate system of the robot is consistent, and the origin is the feature point on the workpiece that is convenient for positioning;
[0100] S2. Establish the weld...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More