

Monocular vision-based warehousing robot indoor positioning method
A monocular vision, indoor positioning technology, used in instruments, image data processing, computing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
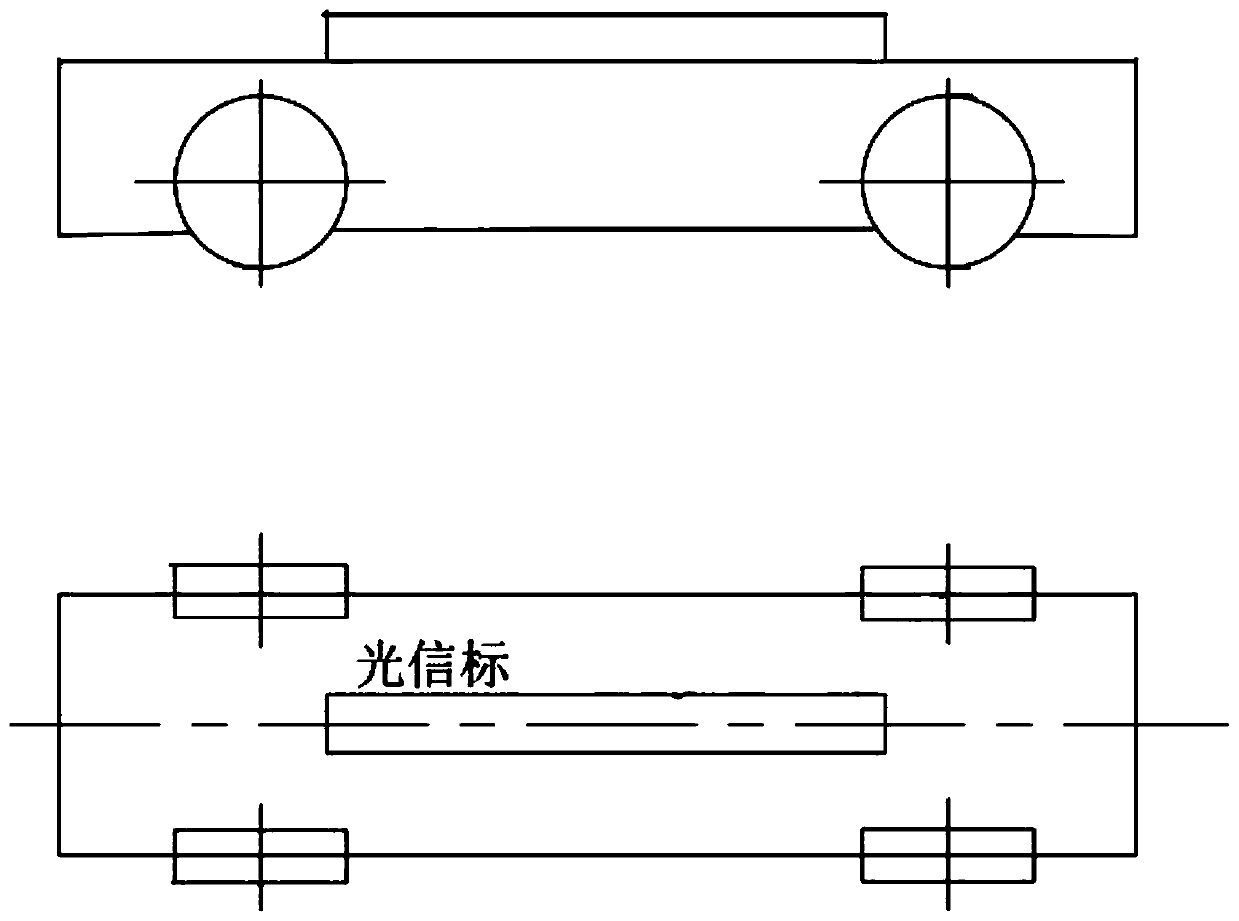
[0070] see figure 1 According to the present invention, a storage robot indoor positioning system based on monocular vision includes:
[0071] The image processing unit reads the grayscale image after the system is calibrated, and then calculates the connected domain after binarization processing, and finally outputs the relevant parameters of the connected domain, removes the lens distortion of the camera, and obtains the relevant coordinate data of the robot in the image. It provides the basis for coordinate calculations to be performed in subsequent units.
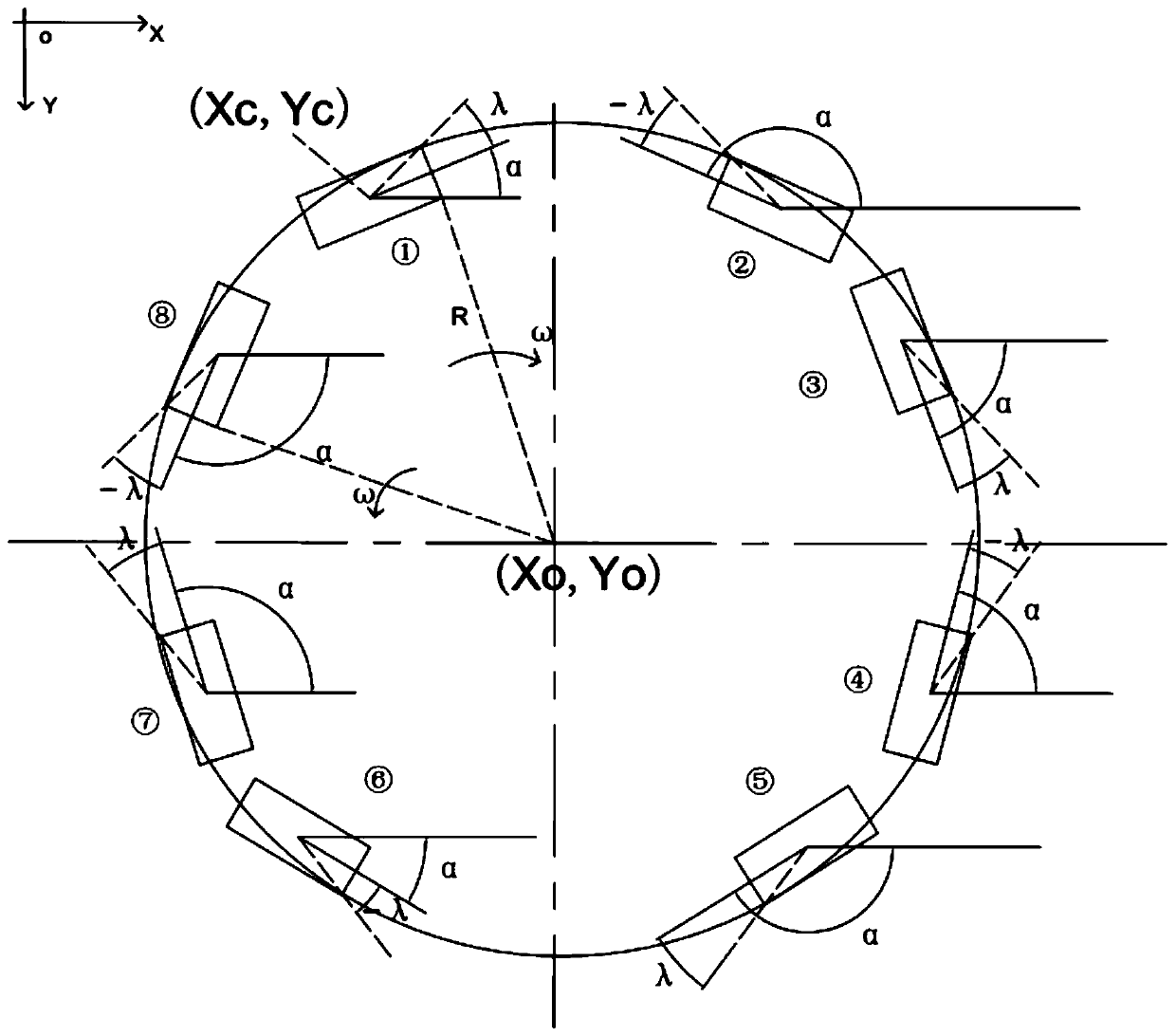
[0072] The robot pose calculation unit detects the target with the same name across the field of view, establishes the robot pose calculation model, reads in the relevant parameters of the connected domain, performs pose calculation in the image coordinate system, and reverses the image coordinate system pose data to the ground In the coordinate system, objects with the same name in different cameras are eliminated, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More