

Variable-rigidity omnidirectional motion soft driver based on line interference technology
A technology of software driver and interference technology, applied in manipulators, chucks, manufacturing tools, etc., can solve the problems of low rigidity and difficulty in grasping heavy objects, achieve high rigidity, good clamping stability, and a wide range of applications Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
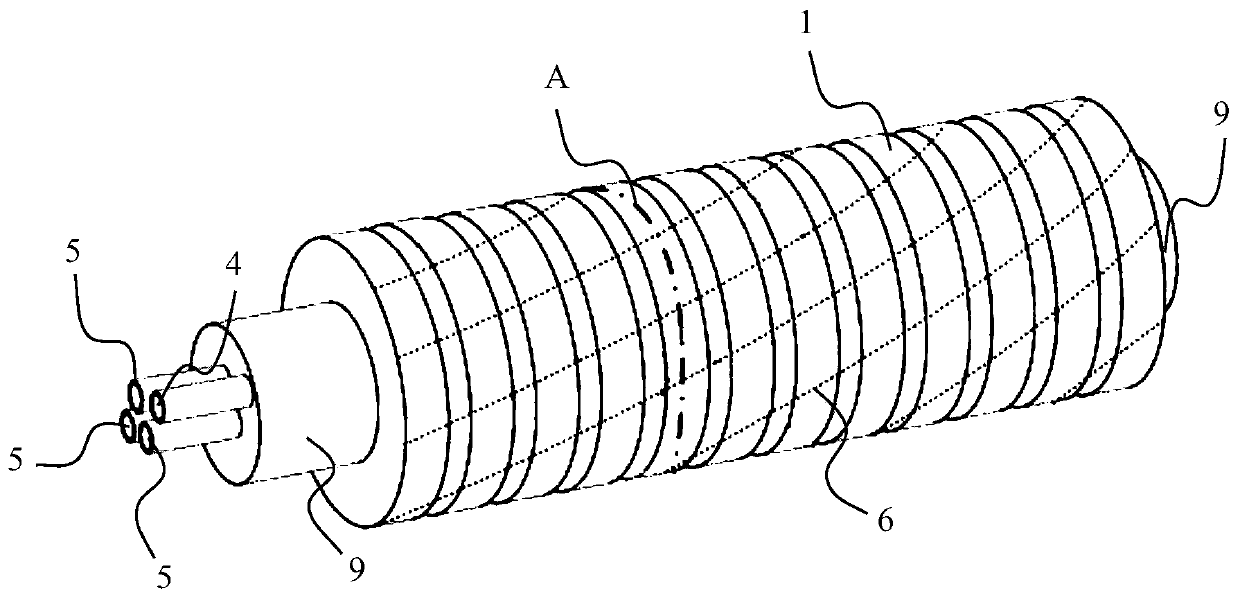
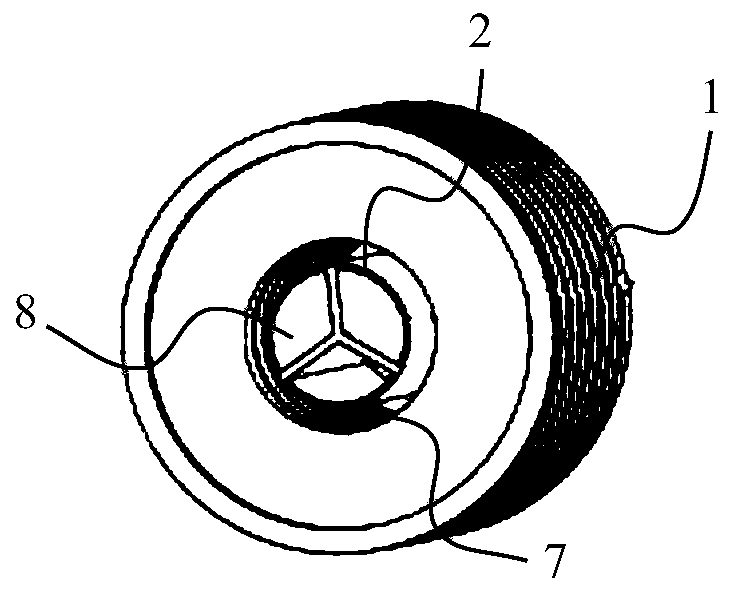
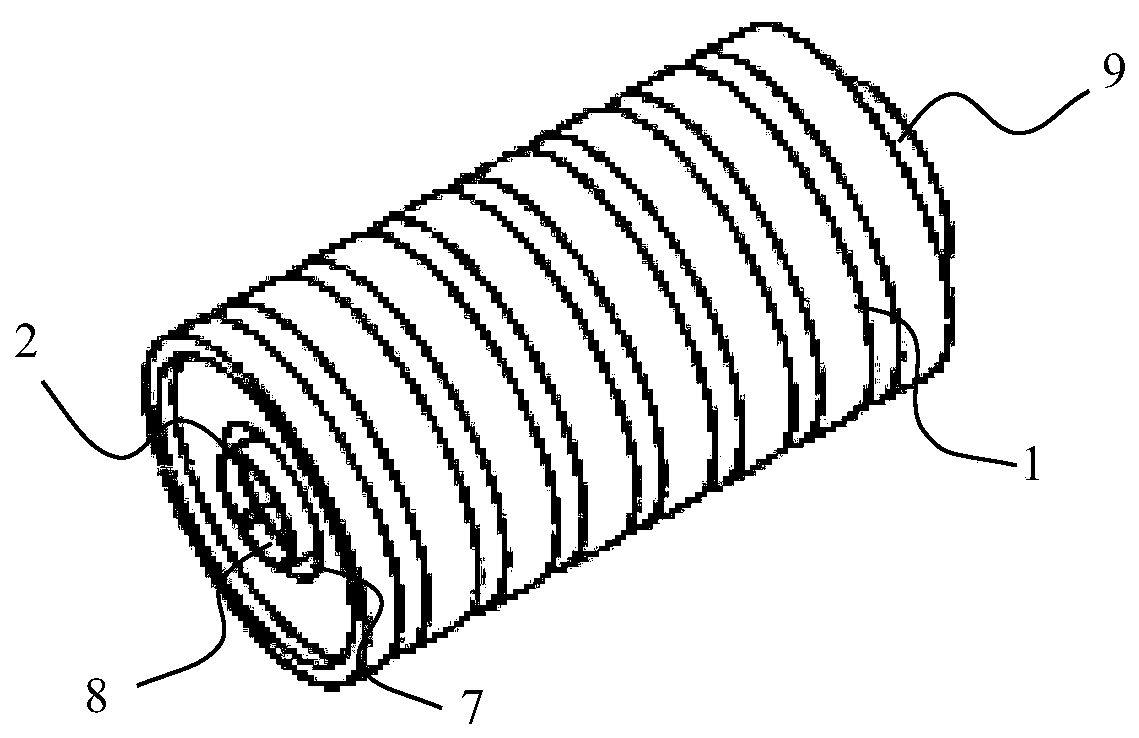
[0045] See attached figure 1 to attach Figure 7 , the embodiment of the present invention discloses a variable stiffness omnidirectional motion soft actuator based on line interference technology, including: corrugated expansion tube 1, hose 2, nylon filament 3, first air tube 4, second air tube 5 and twist limiter line 6;
[0046] The corrugated expansion pipe 1 is a corrugated hollow pipe with openings at both ends and expansion joints;
[0047] The hose...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More