

SLAM and target tracking method
A target tracking and target technology, applied in the field of synchronous positioning and composition, can solve the problems of high energy consumption, low precision, low perception resolution, etc., and achieve the effect of good consistency, high positioning accuracy, and improved positioning accuracy
Active Publication Date: 2020-04-24
BEIJING JIAOTONG UNIV
View PDF7 Cites 9 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] A single lidar synchronous positioning and mapping system has the characteristics of high energy consumption and low perceptual resolution. For scenes where the depth value does not change significantly, high-precision scene mapping cannot be completed.
However, a single visual synchronization positioning and composition system has low precision and the positioning accuracy is easily affected by light changes.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples


Examples
Experimental program
Comparison scheme
Effect test
Embodiment
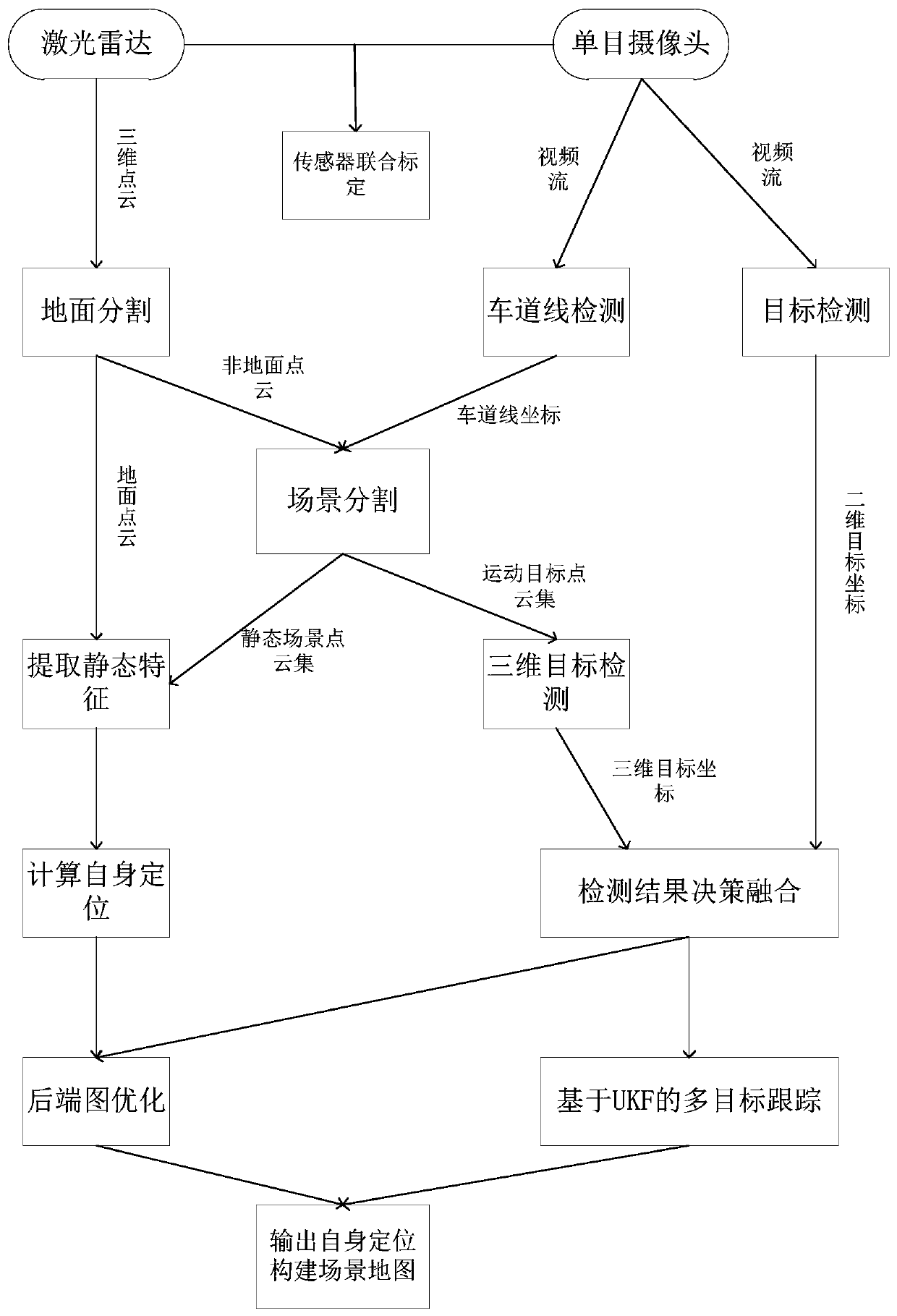
[0089] see figure 1 , this application includes:
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
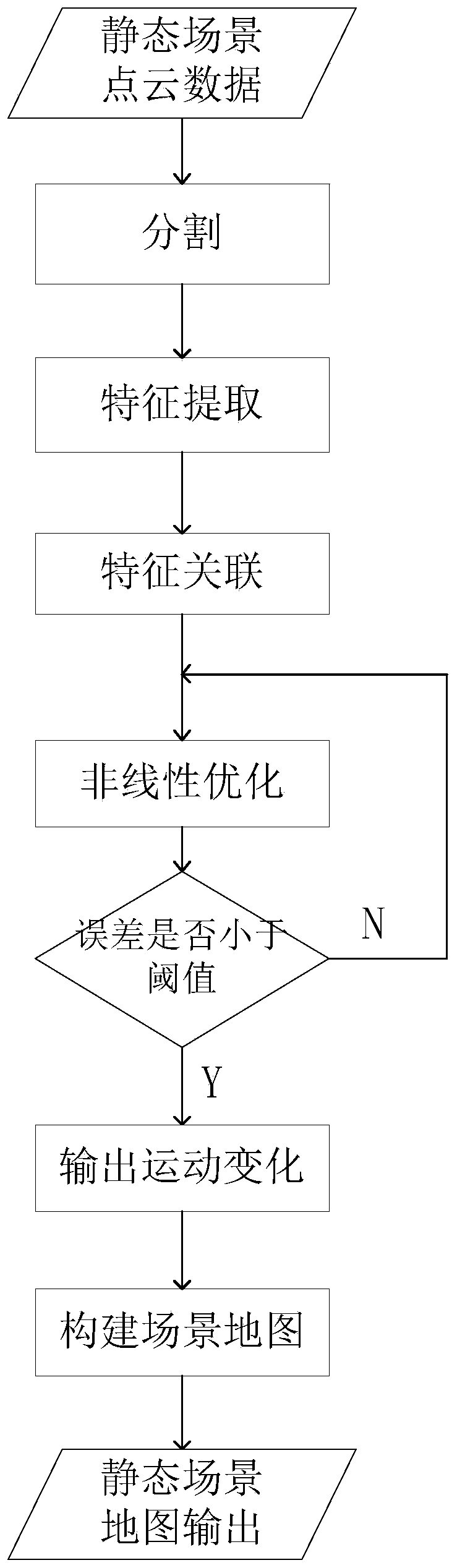
A single laser radar synchronous positioning and composition system has the defects of high energy consumption, low sensing resolution and unobvious depth value change. A single vision synchronous positioning and composition system is low in precision and is easily interfered by illumination change. The invention provides an SLAM and target tracking method, which comprises the following steps: (1)collecting three-dimensional point cloud data and image video data in a real urban road scene, and processing the three-dimensional point cloud data and the image video data; (2) performing segmentation according to a processing result to obtain a static scene and a dynamic scene; (3) processing the static scene, outputting a self-positioning and static scene sub-graph, processing the dynamic scene, outputting a dynamic target pose and track, and constructing a dynamic object sub-graph; and (4) finally, outputting the optimized self-positioning and scene land by adopting a graph optimizationglobal optimization method. The method can improve the positioning precision of a driverless vehicle in a large-scale complex scene, build a high-precision scene map with good consistency, and achievethe tracking of a moving target.
Description
technical field [0001] The present application belongs to the technical field of synchronous positioning and composition, and in particular relates to a SLAM and target tracking method. Background technique [0002] As one of the main development directions of automobile development, unmanned vehicles will play an increasingly important role in changing the way humans travel in the future. High-precision maps provide rich information for driverless platforms, and are the key to self-navigation for driverless cars. To build a high-precision map, the vehicle needs to perceive its own orientation in the real physical space and the three-dimensional structure of the scene, which relies on simultaneous positioning and composition technology. Traditional synchronous positioning and composition techniques focus on ideal static scenes without moving targets, such as country roads and forest trails, while the environment faced by unmanned vehicles often contains many moving targets,...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G01S17/931
Inventor王忠立蔡伯根李文仪王剑陆德彪
OwnerBEIJING JIAOTONG UNIV