

A Pneumatically Driven Two-Finger Manipulator
A pneumatic drive, manipulator technology, applied in manipulators, chucks, manufacturing tools, etc., can solve the problems of single movement and function, difficult to grasp small objects, few drive units, etc., to achieve compact finger structure, high power/weight ratio , the effect of simplifying the structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the present application.
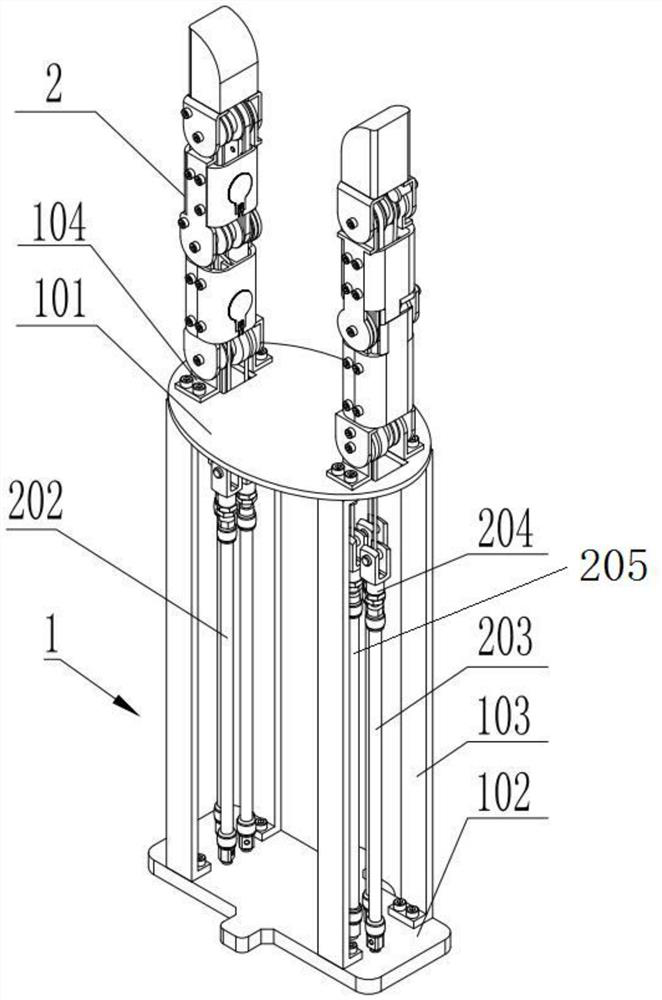
[0033] The invention provides a pneumatically driven two-finger manipulator (see Figure 1-4 ), including a palm 1 and two fingers 2 mounted on the palm 1;
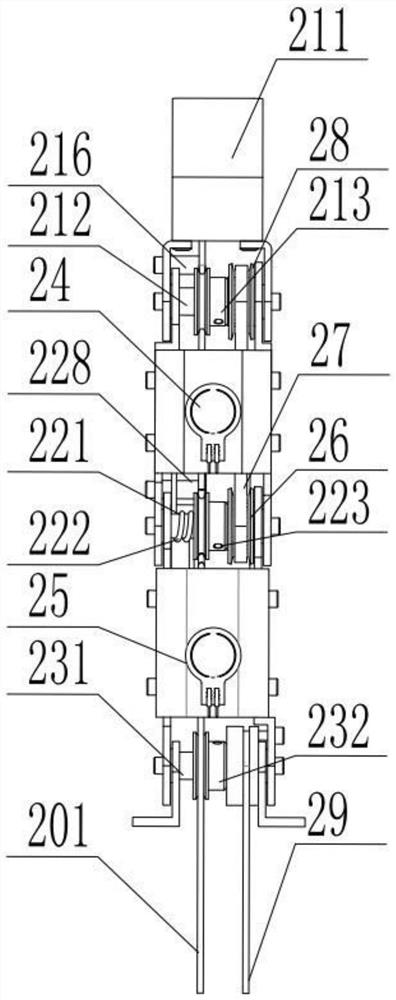
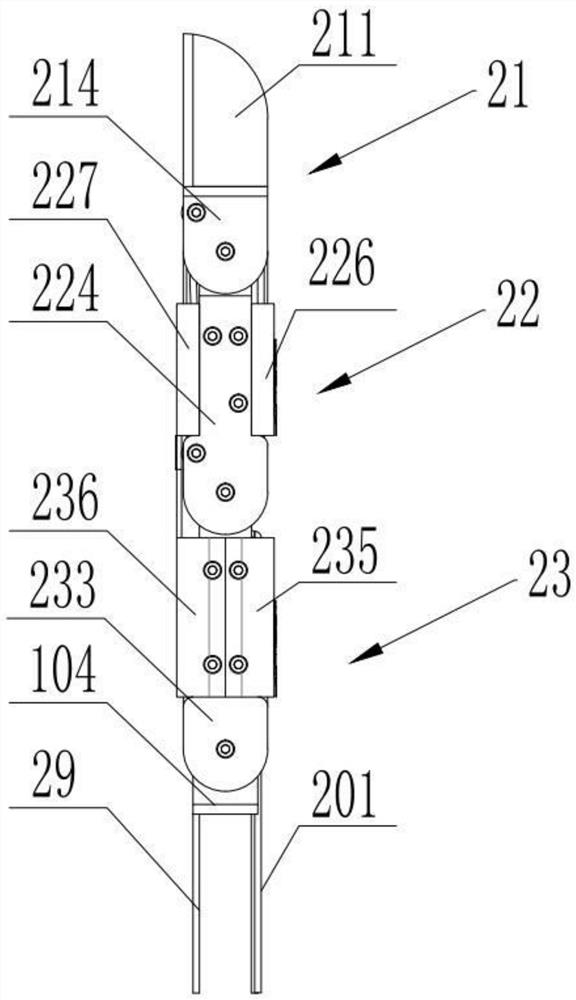
[0034] Described finger 2 comprises far knuckle 21, middle knuckle 22, near knuckle 23, middle knuckle pressure sensor 24, near knuckle pressure sensor 25, middle knuckle timing pulley 26, timing belt 27, far knuckle timing pulley 28 , No. 1 tendon rope 29, No. 2 tendon rope 201, No. 1 pneumatic artificial muscle 202, No. 2 pneumatic artificial muscle 203 and No. 3 pneumatic artificial muscle 205;
[0035] Described far knuckle 21 comprises fingertip 211, far knuckle shaft 212, far guide wheel 213, far knuckle left connecting plate 214 and far knuckle right connecting plate 215; Middle knuckle 22 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More