

Mobile robot relocation method and mobile robot based on genetic algorithm
A mobile robot and genetic algorithm technology, applied in the field of robot positioning, can solve the problems of easy degradation of the algorithm, slow convergence speed, increased cost limitations, etc., to achieve the effect of improving robustness and realizing relocation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0023] The invention aims to solve the problem of positioning failure caused by the robot slipping and drifting, artificial movement, restart or shutdown, and realize high-precision positioning of the mobile robot.
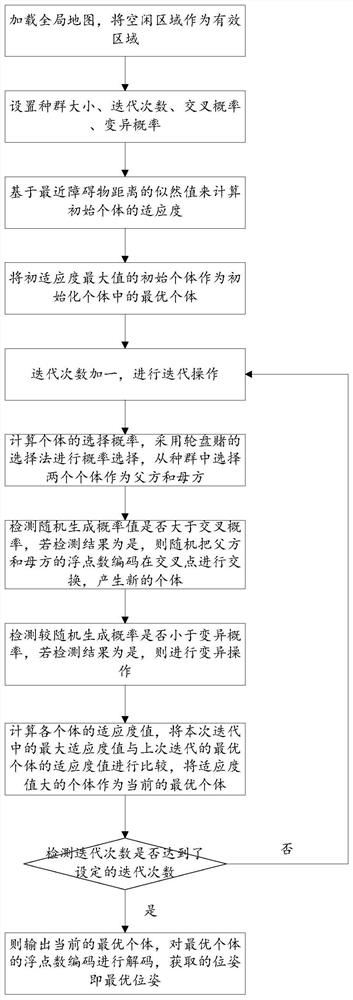
[0024] figure 1 It is a flowchart of a mobile robot relocation method based on a genetic algorithm, and the method specifically includes the following steps:
[0025] S1. Initialize the map: load the global map and use the free area as the effective area;
[0026] The global map is composed of free area, occupied area and unknown area. The occupied area is the area where the lidar de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More