

A mobile robot relocation method based on dynamic region division
A mobile robot and dynamic area technology, applied in two-dimensional position/channel control, instrument, non-electric variable control, etc., can solve the problems of increasing costs, limiting the scope of use of robots, and slow relocation convergence speed, etc., to achieve relocation The effect of positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
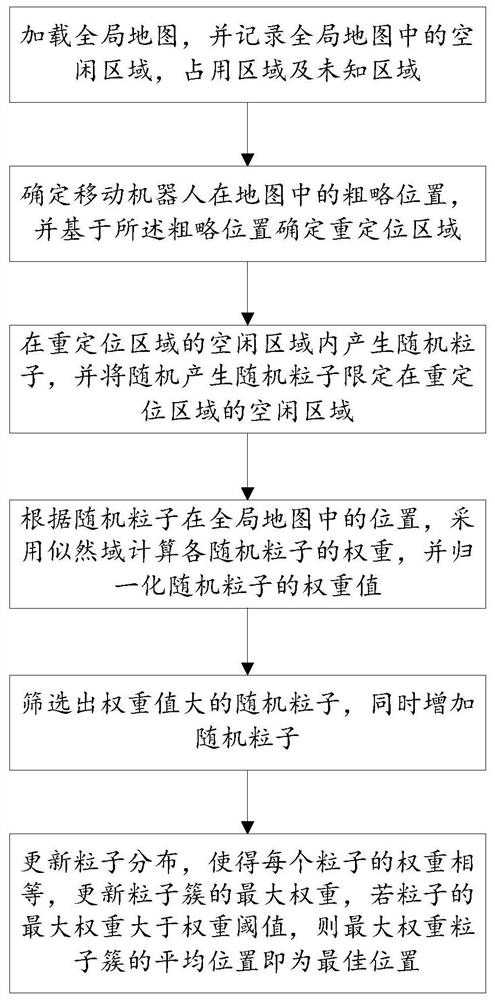
[0022] Dynamically draw an area of appropriate size and shape in the global map, randomly generate particles in the free area of the drawn area, use particle filtering to sample and resample the particles, and add random sampling to iteratively update the filter. When the maximum weight satisfies the set conditions, the best position at this time is obtained, and the relocation is completed.
[0023] figure 1 A flowchart of a method for relocation of a mobile robot based on dynamic area division provided by the embodiment of the present invention, the method specifically includes the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More