

Indoor positioning method for smartphones based on hybrid modeling of spatial point-line-surface features
A smart phone, indoor positioning technology, applied in the field of computer vision and indoor positioning and navigation, can solve the problems of indoor autonomous positioning and navigation that have not been well solved, difficult to support the realization of robust indoor positioning, high computational complexity, and achieve lightweight The effect of high-level indoor space modeling, high accuracy and low algorithm complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
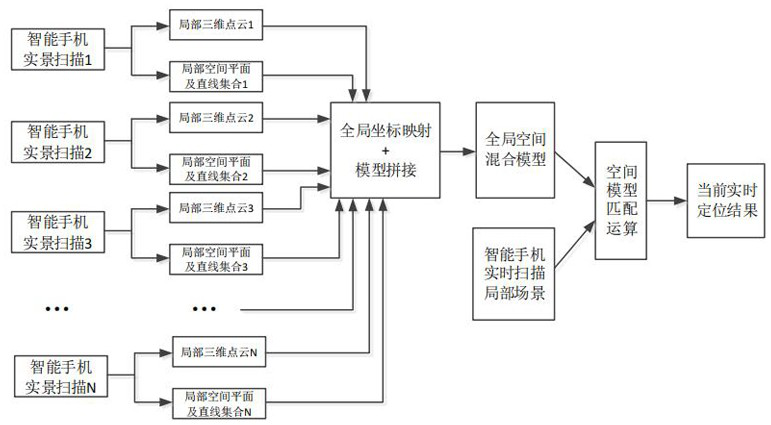
[0030] like figure 1 As shown, a smart phone indoor positioning method based on spatial feature hybrid modeling uses the smart phone AR platform to capture and extract various features such as points, lines, and surfaces in the local real scene space, and then realizes multiple local real scene space through global coordinate mapping technology. The global splicing of point cloud and 3D space surface line features generates a global m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More