Controlling autonomous vehicles using safe arrival times
A technology of safe time and arrival time, applied in the direction of motor vehicles, control devices, vehicle components, etc., can solve problems such as no consideration of motion or state, unsafe paths, frequent updates, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
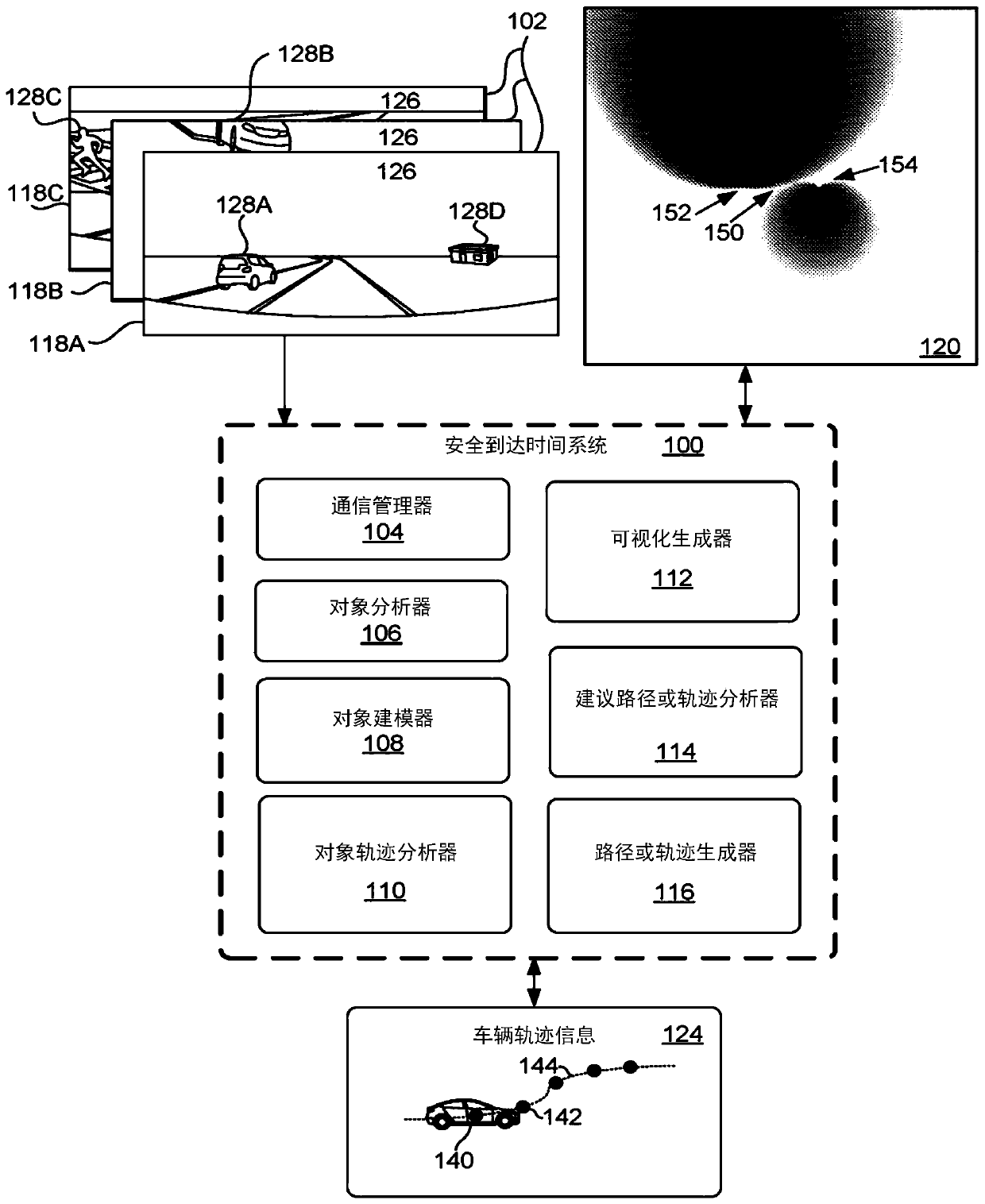
[0028] Systems and methods related to controlling autonomous vehicles using safe times of arrival are disclosed. The present disclosure may be described with respect to an example autonomous vehicle 140 (alternatively referred to herein as "vehicle 140" or "autonomous vehicle 140"), an example of which is referenced herein Figures 12A-12D described in more detail. Although this disclosure primarily provides examples using autonomous vehicles, safe arrival times may be used to control other types of objects. Additionally, the safe arrival times, safe time intervals, and visualizations described herein may be used for purposes other than controlling autonomous vehicles. For example, visualizations may be displayed on an HMI display and / or a dashboard (eg, a dashboard of a vehicle) rather than being used to control the autonomous vehicle.
[0029] When path planning, traditional systems can generate a heat map of the environment around the autonomous vehicle at a given time an...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap