

Mechanical hand
A technology of manipulators and mechanical fingers, applied in the field of manipulators, can solve problems such as inability to imitate the fine work of human hands
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
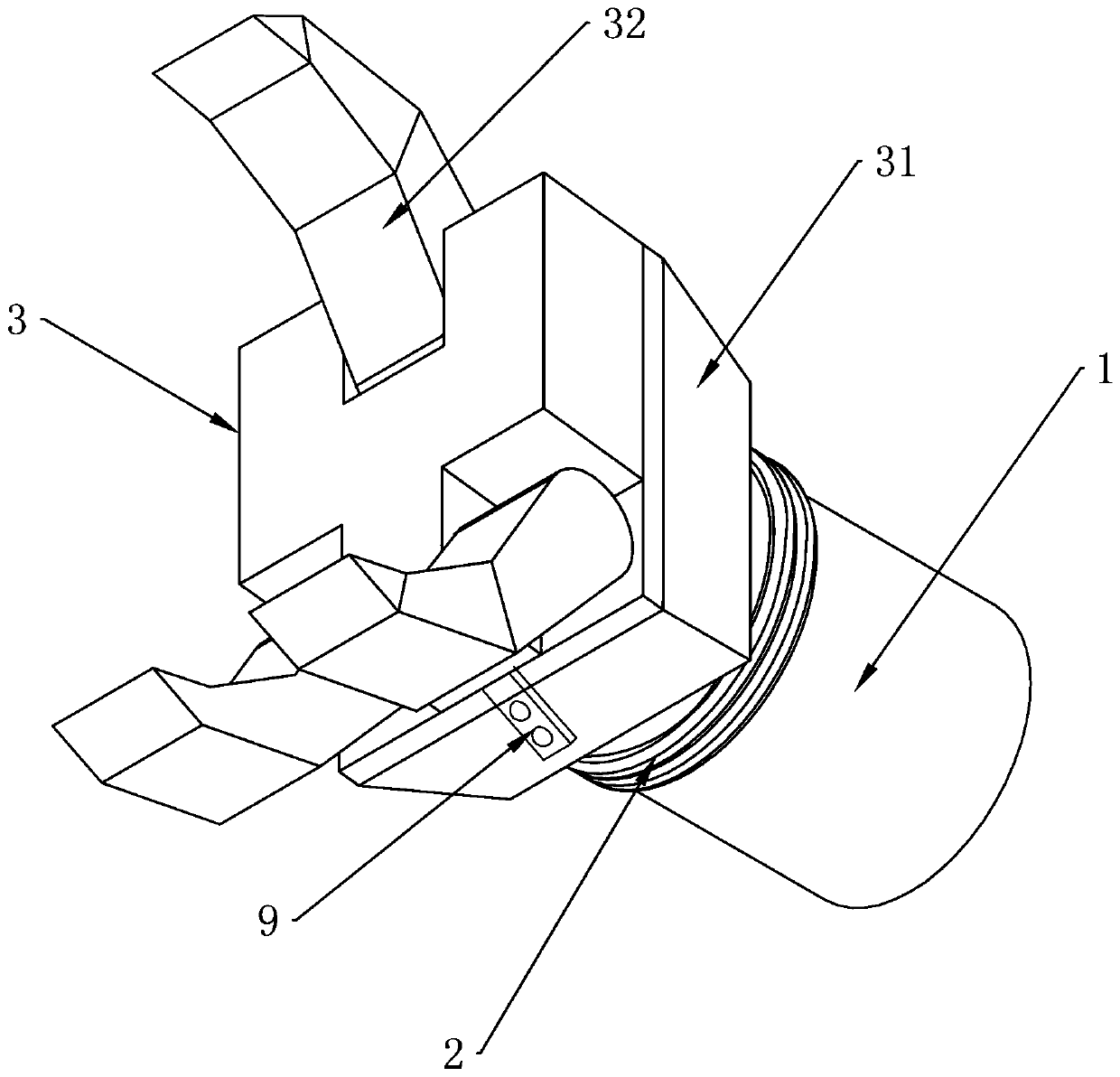
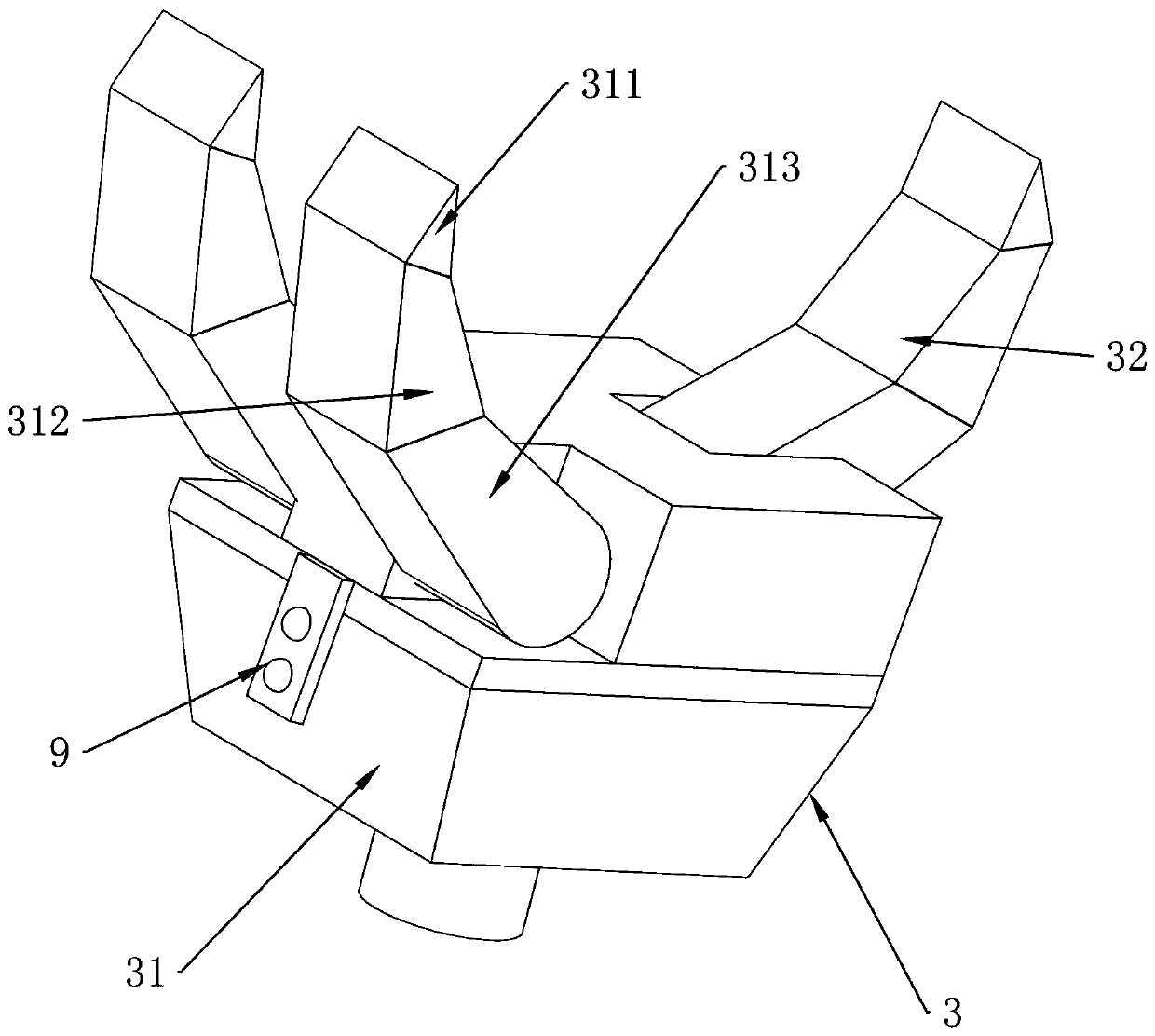
[0054] In further embodiments of the present invention, please continue to refer to Figure 1 to Figure 7 As shown, the other end of the mechanical palm 31 is provided with at least three mounting holes, and the three mounting holes are arranged in the shape of "pin", and the three mechanical fingers 32 are installed in the three mounting holes respectively.
[0055] In a further embodiment of the present invention, each socket 5 includes a plurality of telescopic sleeves 51 connected in sequence, and the ends of two adjacent telescopic sleeves 51 are rotationally connected, and each telescopic sleeve 51 includes: two connecting rings 511 and a The telescoping member 512 is rotatably connected to one side of the two connecting rings 511 , and the two ends of the telescoping member 512 are respectively fixedly connected to the two connecting rings 511 .
[0056] In a further embodiment of the present invention, several telescopic sleeves 51 include: a first telescopic sleeve 61...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More