Object attitude estimation method, device and equipment
A pose estimation and object technology, which is applied in the field of computer vision and can solve the problems of difficulty in estimating object pose information and low robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The current object pose estimation methods only consider how to fuse multiple information, but do not consider the problem of camera scale changes. For monocular cameras with far and near changes, the camera changes the scale and angle of the object, so these methods For monocular cameras with far and near changes, it is difficult to estimate the pose information of objects, resulting in low robustness.
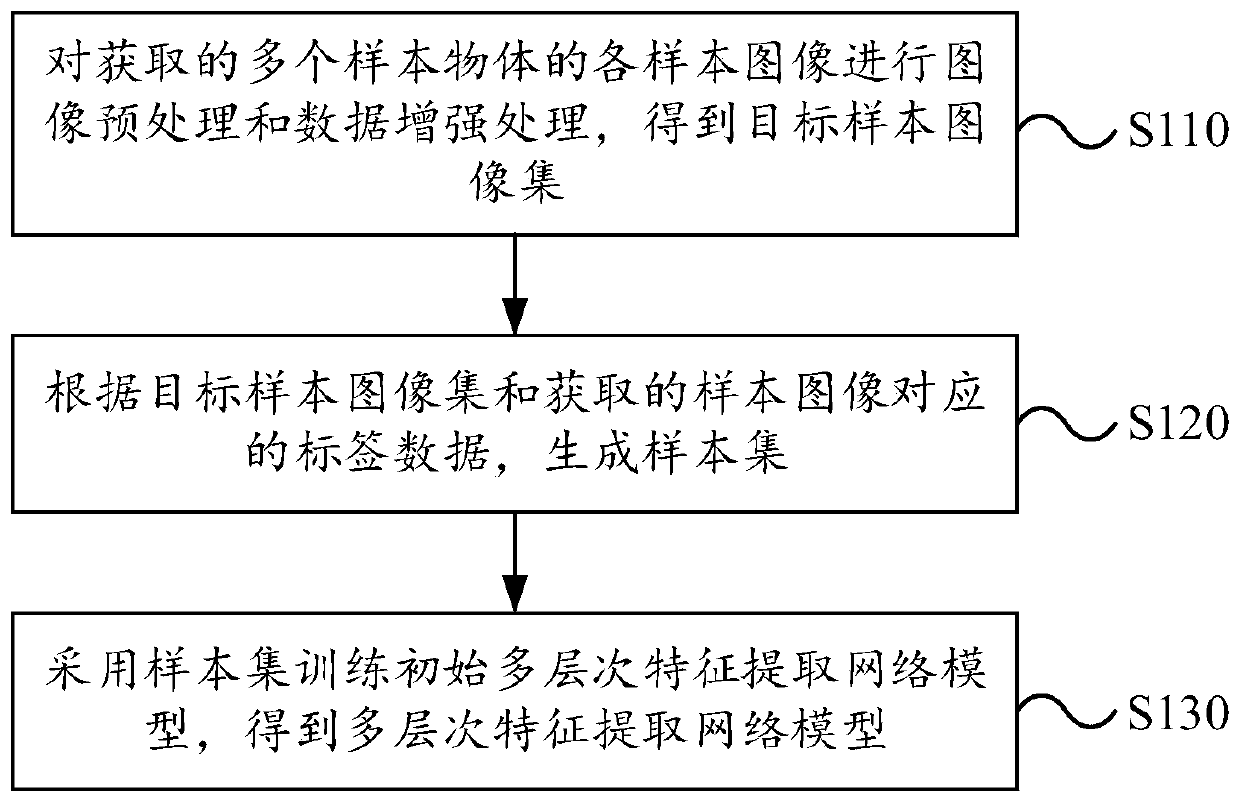
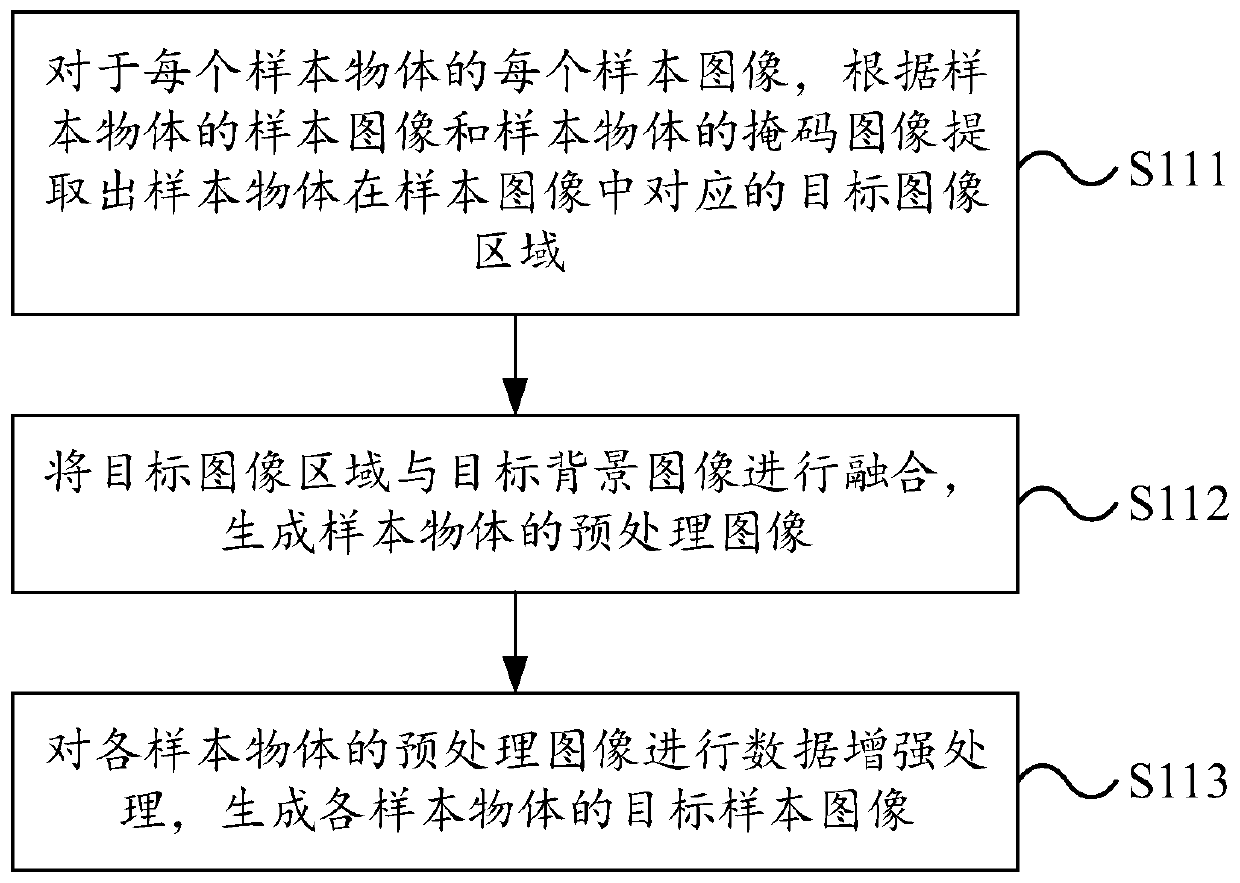
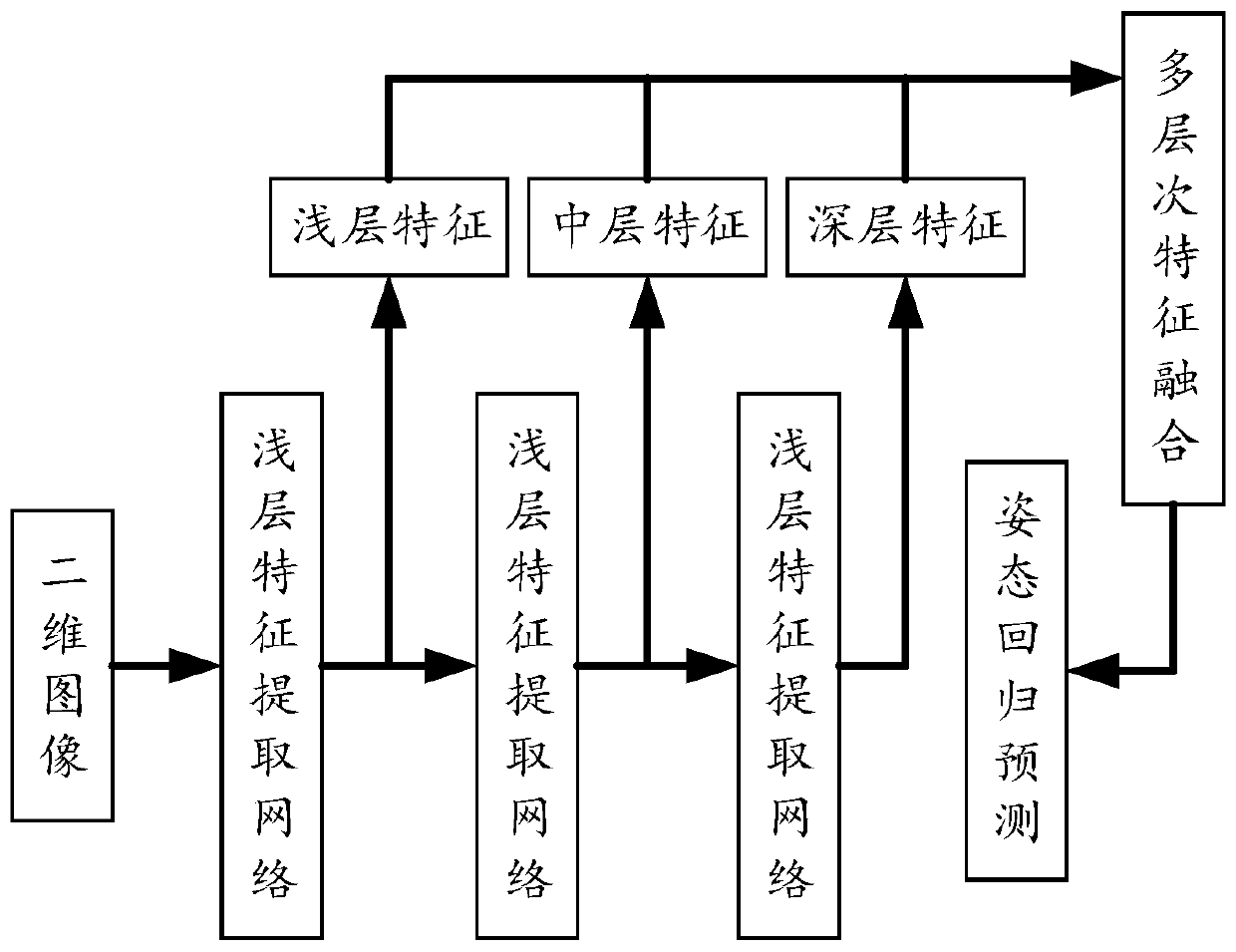
[0067] In view of the above technical problems, embodiments of the present invention provide an object pose estimation method, device and equipment, the method uses a pre-trained multi-level feature extraction network model to predict the target image of the target object, and obtain the key point coordinate information of the target object ; Then, according to the key point coordinate information of the target object and the spatial position relationship of the key point of the target object, determine the coordinate transformation relationship of the camera relative t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More