

Image acquisition method of inspection robot
An inspection robot and image acquisition technology, applied in image communication, inspection time patrol, color TV components and other directions, can solve the problems of uneven light, long inspection time, unable to obtain clear images, etc., to ensure stability and robustness, reduce invalid information acquisition, improve the effect of anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The specific embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
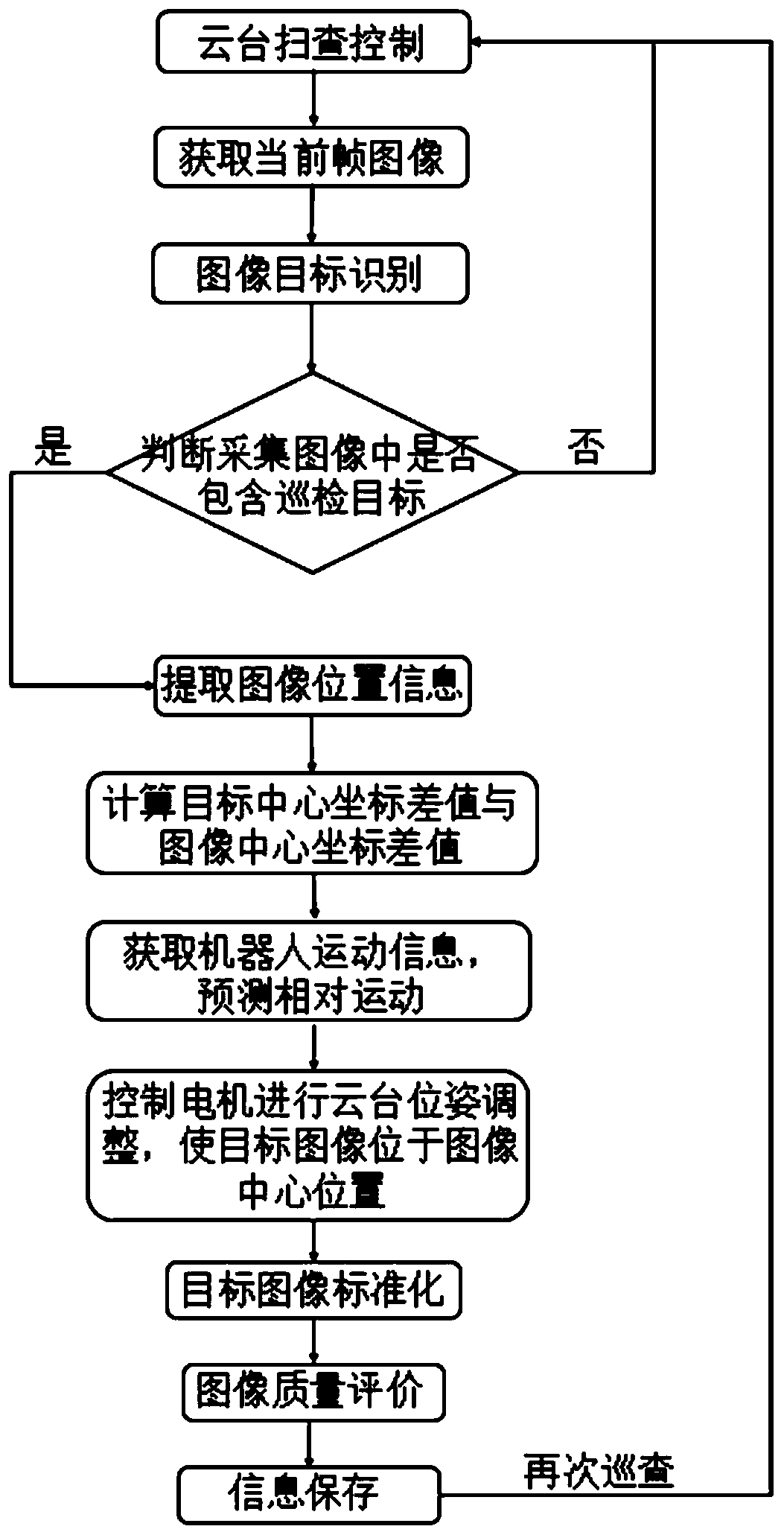
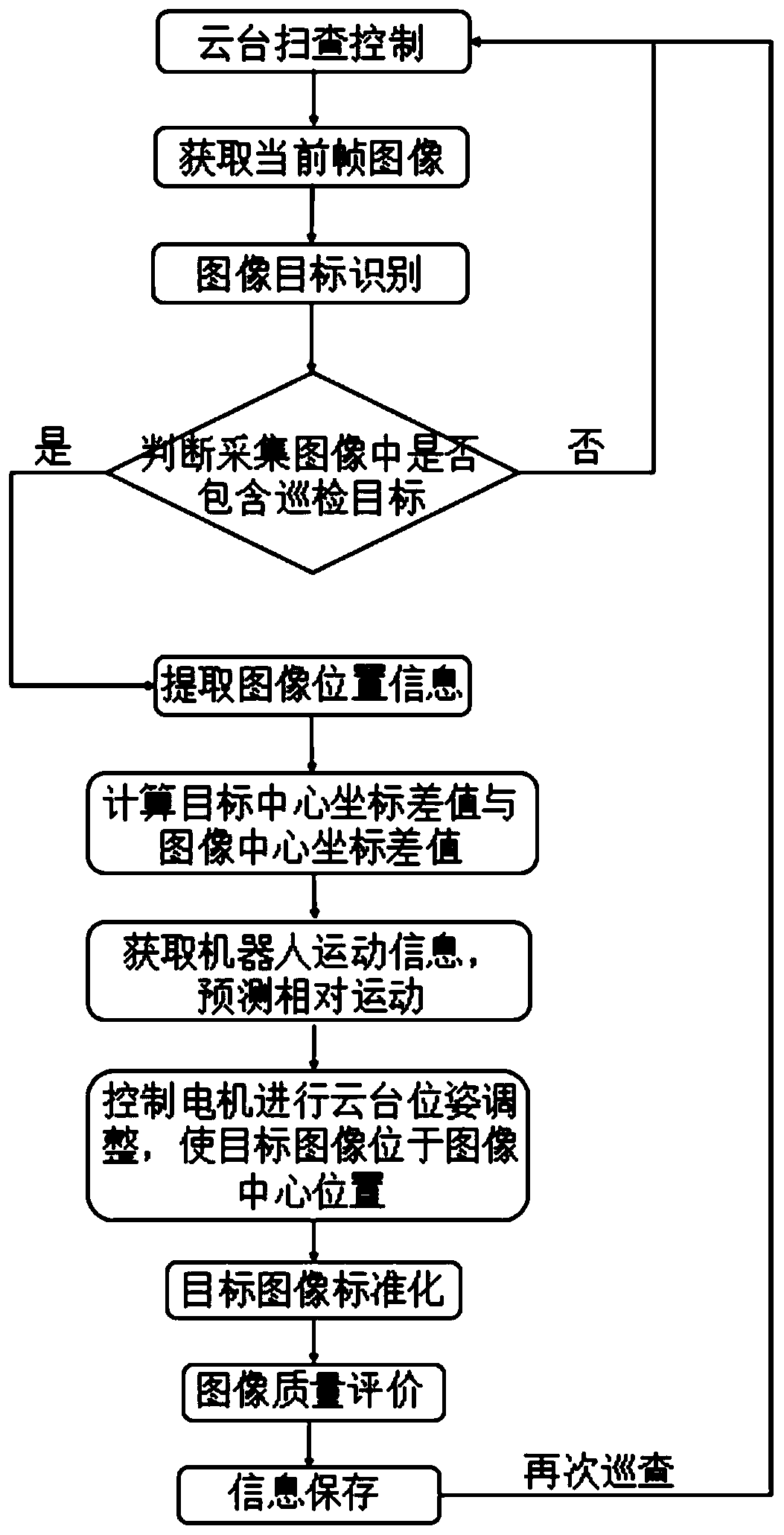
[0021] Such as figure 1 As shown, the image acquisition method of a kind of inspection robot provided by the present invention comprises the following steps:
[0022] (1) The inspection robot performs the inspection operation, and the gimbal on the robot starts to scan the surrounding environment; and judges whether the target image is included in the camera field of view, specifically: use the YOLOV3 algorithm to judge whether the target image is included in the camera field of view, and if so, output The position information and label information of the target image in the camera field of view; the label information indicates the category of the target image, that is, potentiometer switch, meter or oil level, etc. The YOLOV3 algorithm is trained by the substation target image data set to realize the effective recognition of targ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More