

Two-step robust filtering method and two-step robust filtering system for GNSS/INS integrated navigation system
An integrated navigation system and residual error technology, applied in the field of navigation, can solve problems such as system noise and measurement noise gross errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
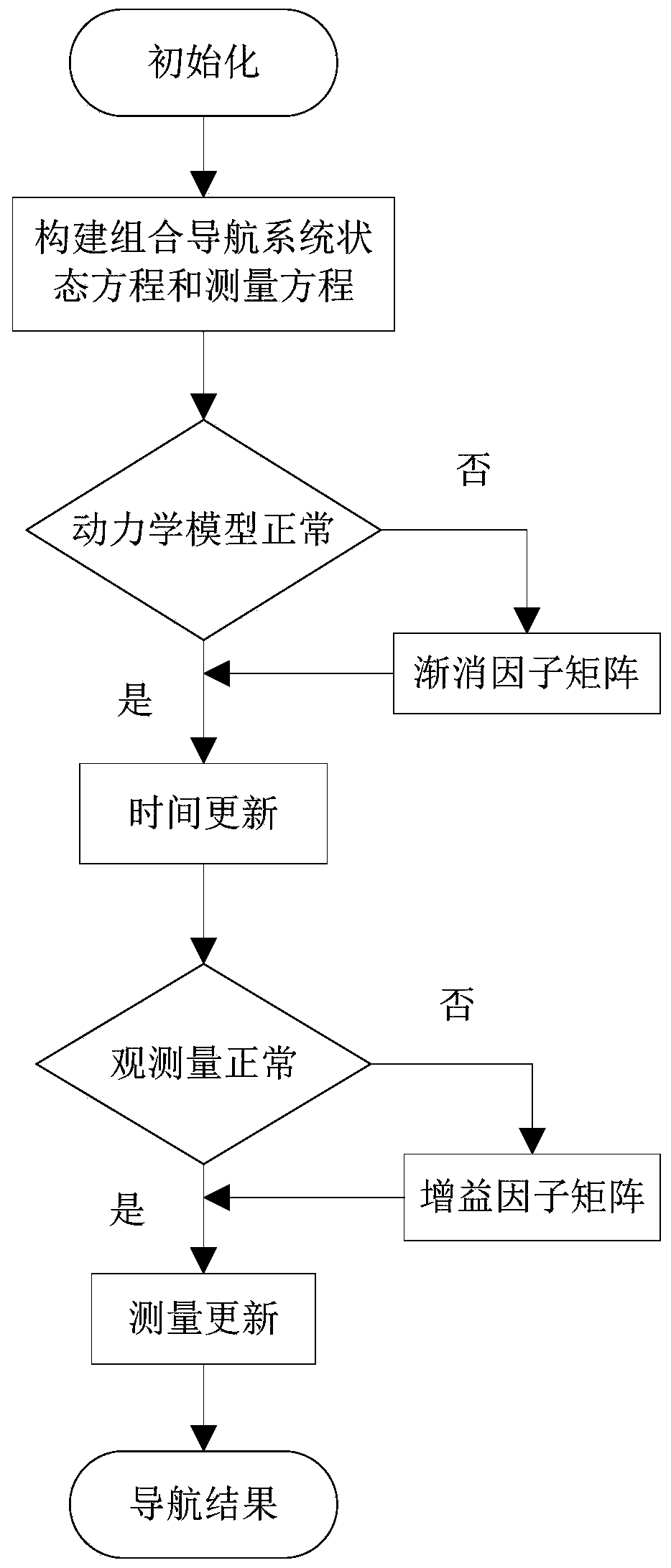
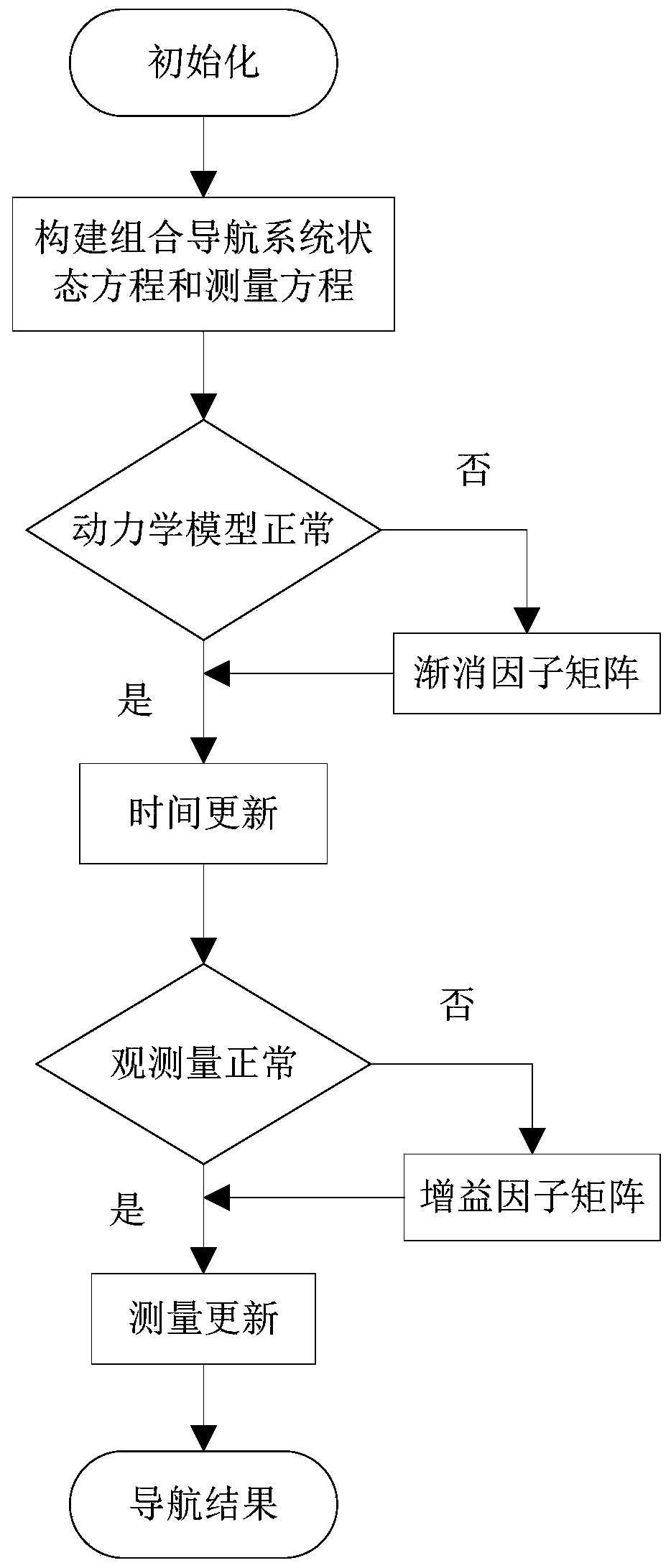
[0075] Such as figure 1 As shown, the present embodiment provides a two-step robust filtering method based on a tightly coupled GNSS / INS integrated navigation system, including the following steps:
[0076] Firstly, each matrix variable is initialized, which affects the positioning startup time. The error covariance matrix of this embodiment represents the degree of error between the actual measured value and the real value, so its diagonal elements cannot be all zero;
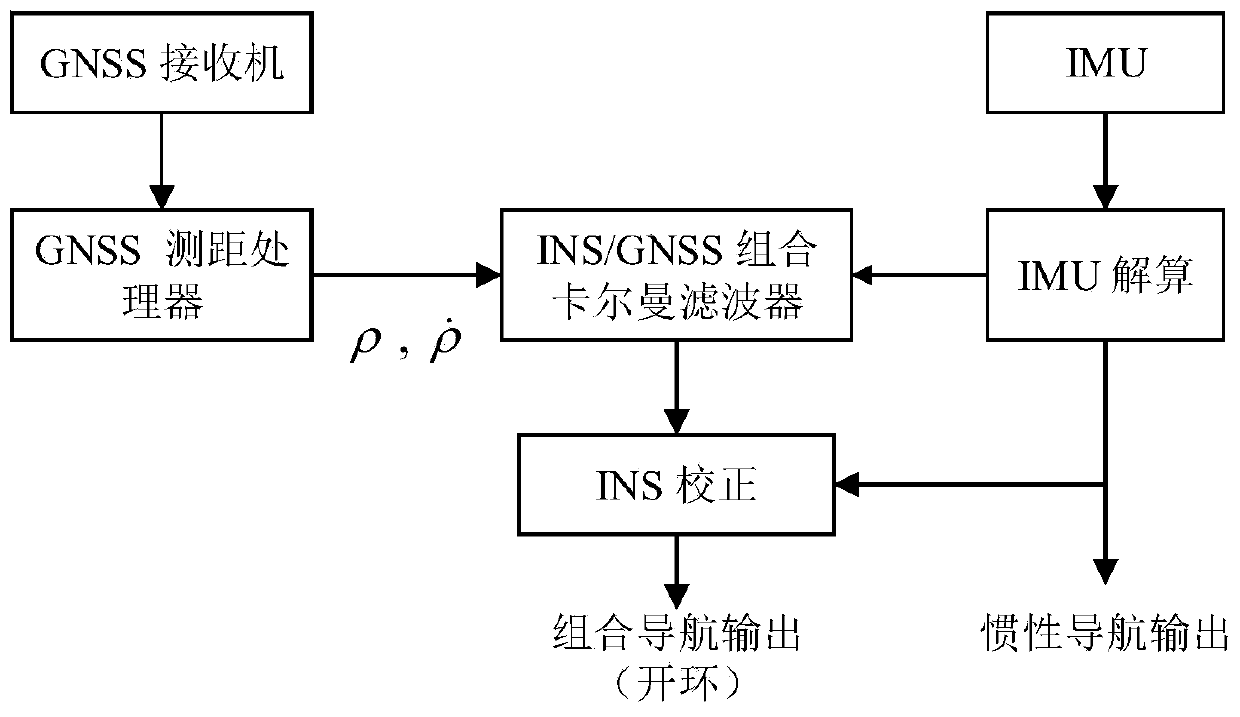
[0077] Then establish the state equation and measurement equation of the GNSS / INS integrated navigation system, fuse the GNSS / INS data according to the Kalman filter tight coupling method, and use the inertial navigation state vector x INS and GNSS state vector x GNSS As the error state vector x for data fusion, the corresponding other variables also contain two kinds of data.
[0078] In this embodiment, the state equation and measurement equation of the GNSS / INS integrated navigation system are:
[0079] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More