

A visual imitation-based learning method for robot sequence tasks
A learning method and robot technology, applied in the field of deep learning and imitation learning, and robot control, can solve problems such as difficulty in applying new unfamiliar scenes and limited generalization ability, and achieve strong practicability, strong generalization, and damage prevention Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
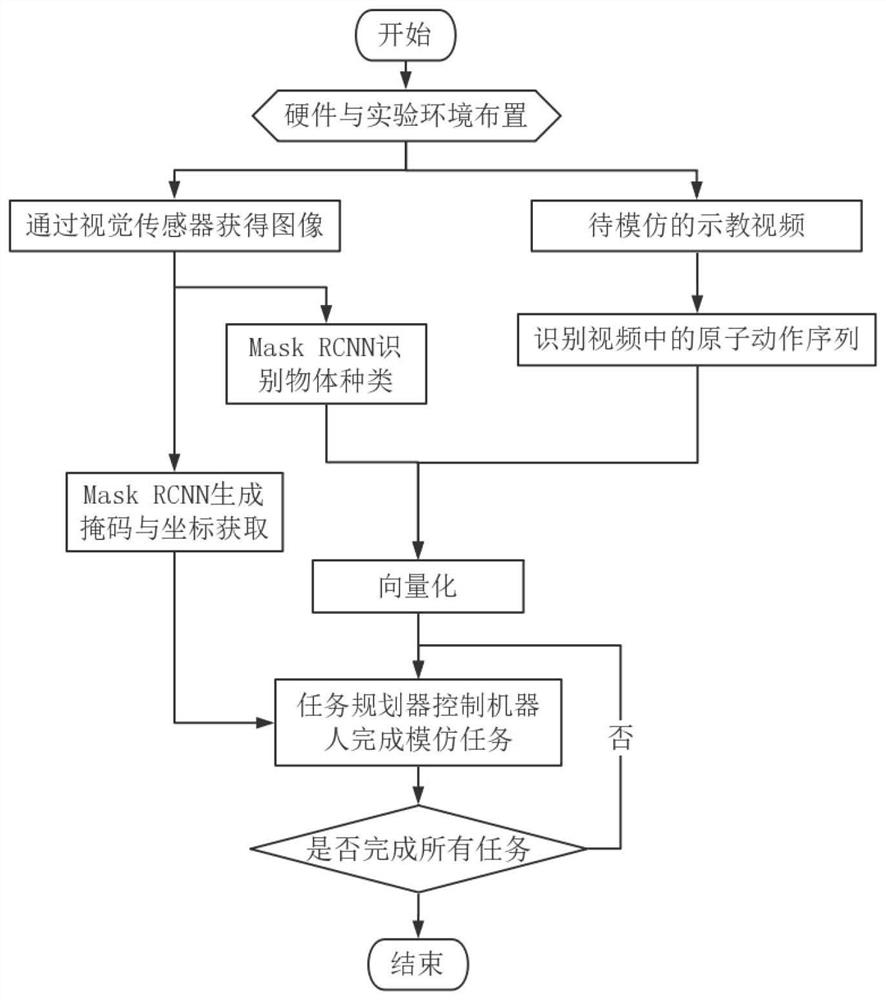
[0071] Such as figure 1 As shown, the present invention proposes a robot sequence task learning method based on visual imitation, and the specific steps are as follows:
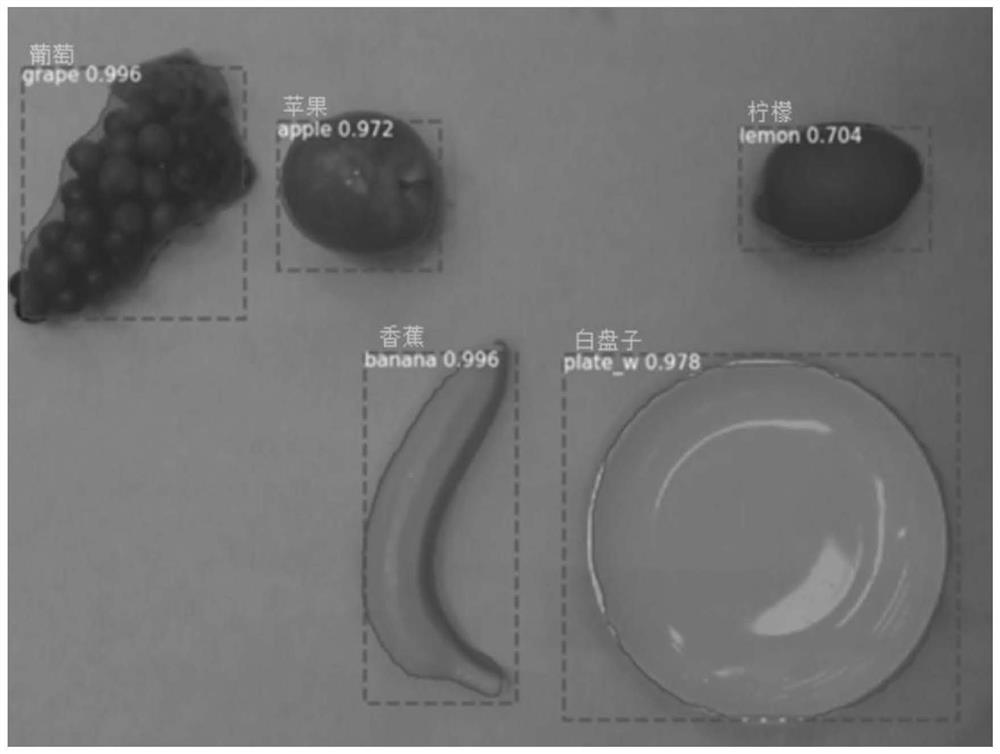
[0072] Step 1. The vision sensor is fixed directly above the object, and the field of view covers the entire working plane. The robot is located on the side of the working plane, and its working space covers the entire working plane;
[0073] Step 2. Assuming that there are n obj...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More