Education robot and control system thereof
A control system and robot technology, applied in the field of educational robots, can solve the problems of lack of adaptability of the main body of the robot, not suitable for intelligent education in complex environments, etc., and achieve the effect of preventing collision events of moving obstacles, preventing collision events, and simple overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
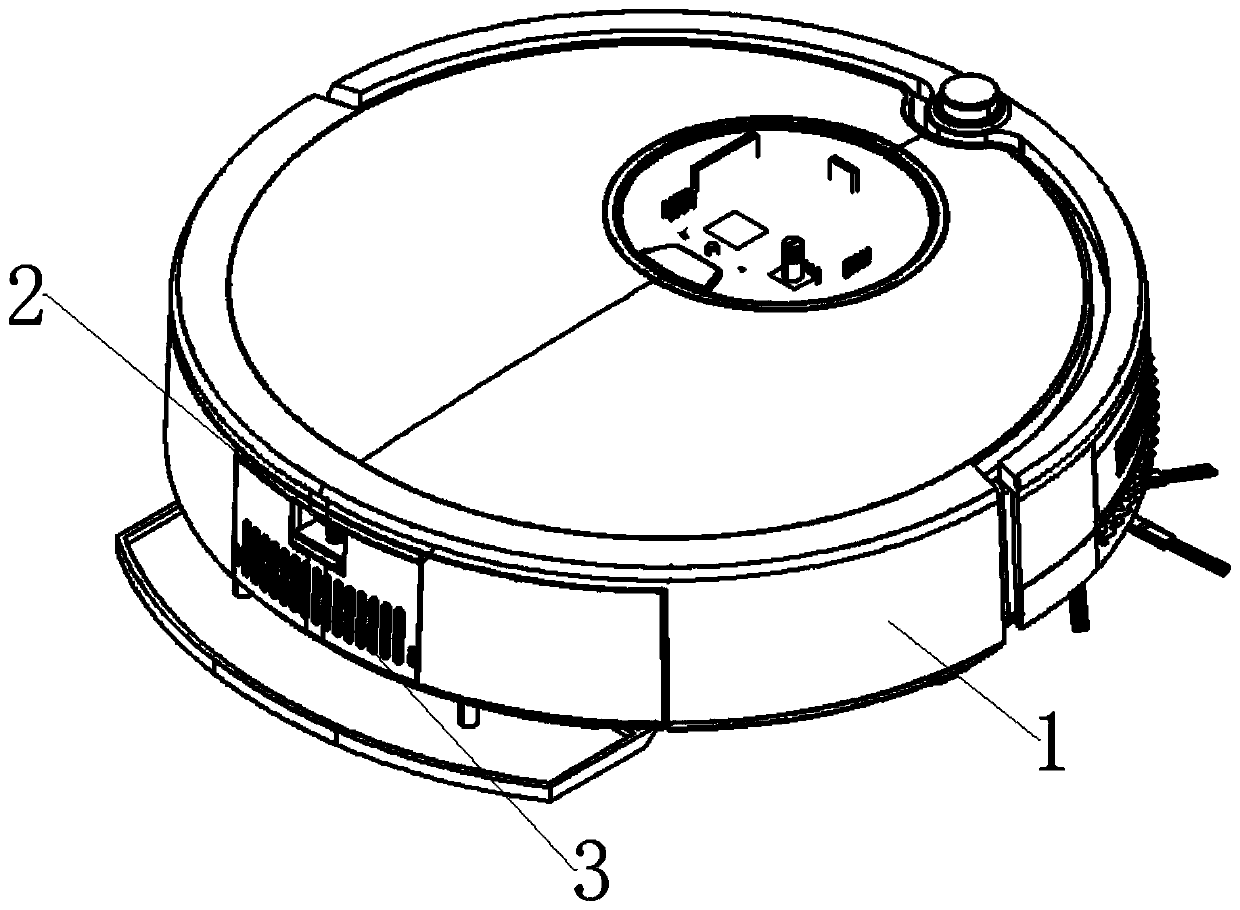
[0036] An educational robot and its control system, comprising a robot body 1 and functional components detachably connected to the robot body 1; wherein, the robot body 1 is configured to be used as the movable functional component The carrier is connected to the functional component through a media; the functional component is configured to be used as a function extension of the robot main body 1 .
[0037] The robot main body 1 includes a sensing module, a function executing circuit module, an intelligent control module, and a measurement and control module, and the intelligent control module is respectively connected with the sensing module, the function executing circuit module, and the measurement and control module; Wherein, the sensing module is configured to sense the status of the robot body 1 and the functional components and changes in the external environment; the function execution circuit module is configured to provide driving force to the functional components;...
Embodiment 2
[0042] An educational robot and its control system, including a robot body 1, a power supply connected to the robot body 1, and functional components detachably connected to the robot body 1; wherein,
[0043] The robot main body 1 is configured to be used as a carrier of the movable functional components, and is connected to the functional components through a medium; the robot main body 1 includes a casing and a mounting device arranged in the casing Each component and module can be connected to the housing and the installation cavity.
[0044] The power supply is configured to provide energy required for driving the robot main body 1 and the functional components;
[0045] The functional components are configured as a function extension of the robot main body 1, and the functional components include but are not limited to: sweeping components, manipulator components, lighting components, sound components, motor components, and pneumatic components. The components can be or...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More