

Mobile robot path planning method based on improved artificial potential field algorithm
A mobile robot and path planning technology, applied in the direction of instruments, navigation calculation tools, non-electric variable control, etc., can solve the problems of path planning operation failure, mobile robot influence, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
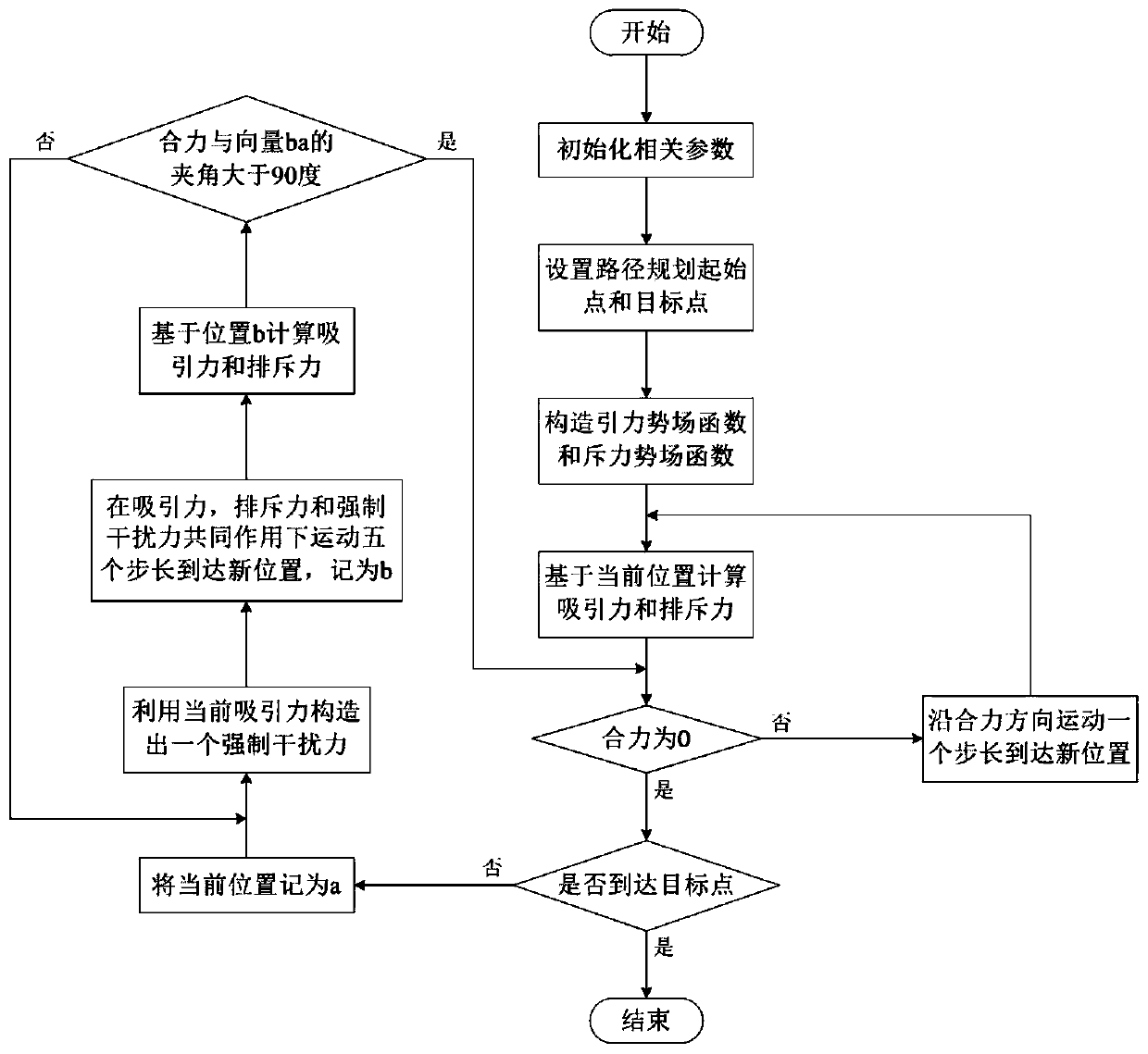
[0019] see figure 1 , the main steps of the present invention are:
[0020] S1, initialize relevant parameters, set the starting point and target point of path planning;
[0021] S2. Construct a gravitational potential field function according to the distance from the mobile robot to the target point;
[0022] S3, constructing a repulsion potential field function according to the distance from the mobile robot to the target point and the distance to the obstacle;
[0023] S4, calculate the negative gradient of the gravitational potential field function based on the current position of the mobile robot to obtain the current attractive force of the mobile robot;
[0024] S5, based on the current position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More