Machine vision based automatic grabbing algorithm for steel coil crane
A technology of machine vision and steel coils, which is applied in the direction of load hanging components, transportation and packaging, etc., can solve the problems of reduced production efficiency, collision damage between positioning manipulator and steel coils, and high requirements for operators, so as to ensure positioning accuracy and improve The effect of the level of mechanical automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below the specific implementation process of the present invention is described further below:
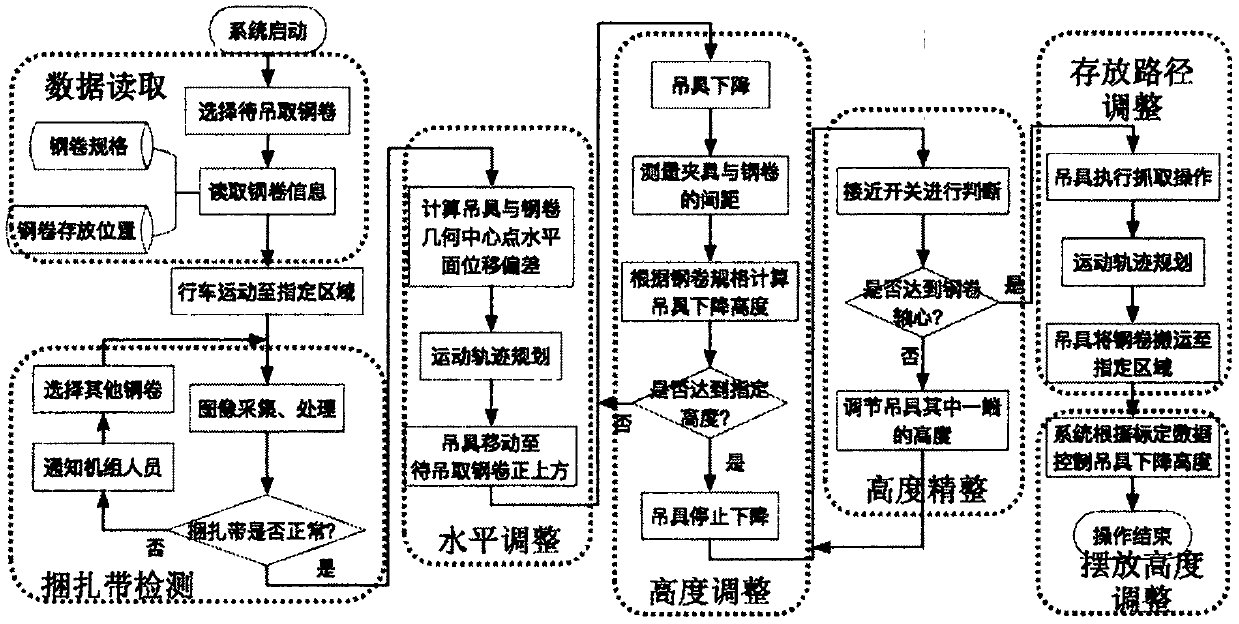
[0028] A kind of automatic grabbing algorithm of steel coil crane based on machine vision, is characterized in that: comprises the following steps:
[0029] 1) Data read
[0030] After the system is started, it first selects the coil to be hoisted as required, reads the coil information from the database, including the coil specification and the coil storage location, and then controls the coil hoist to reach the designated area.
[0031] 2) Binding belt detection
[0032] After the steel coil crane reaches the designated area, it returns to the arrival signal, and at the same time controls the spreader installed with the industrial camera to reach the designated height, and then commands the industrial camera to collect pictures of the steel coil. First, it detects whether the strapping is broken according to the picture. If it breaks, an alarm signal is issued. Inform th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com