

Laser tracker-based mobile detection robot large component shape reconstruction method
A laser tracker, mobile detection technology, applied in instruments, measuring devices, optical devices, etc., can solve the problem of not providing an application method for shape detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
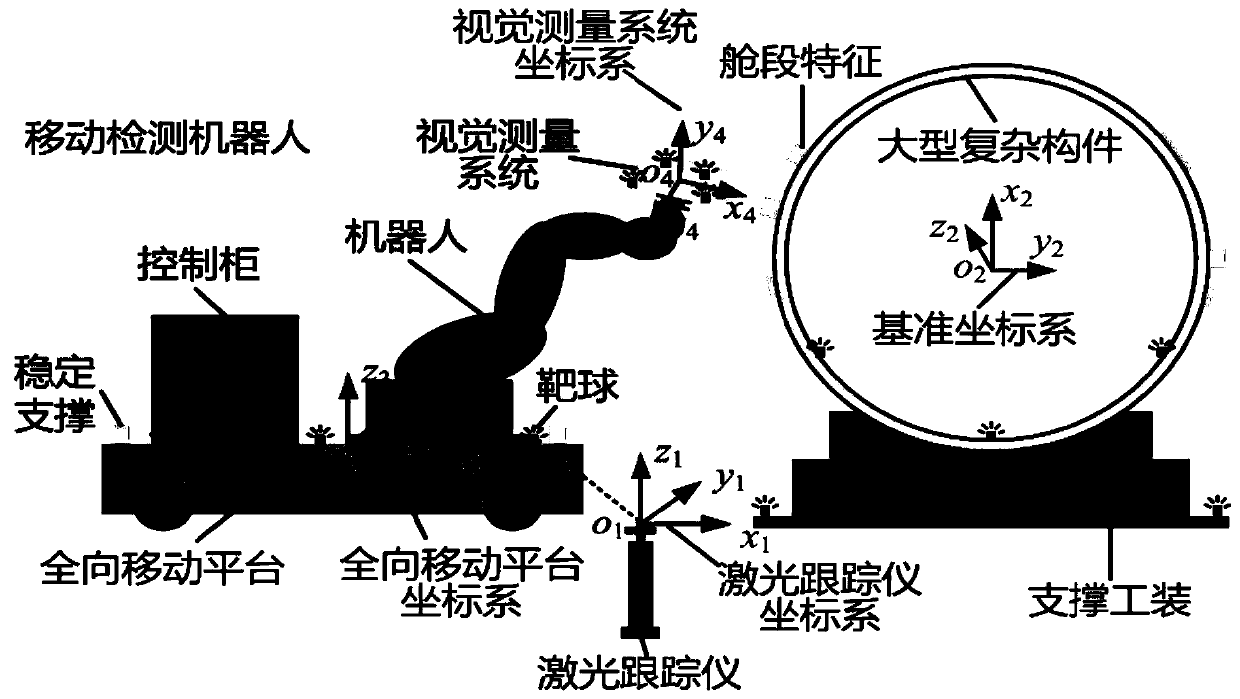
[0047] Such as figure 1 As shown, the mobile detection robot system based on the laser tracker includes a control cabinet for controlling the robot, an omnidirectional mobile platform, and a visual measurement system; an omnidirectional mobile platform for supporting, mobile robots, control cabinets, and a visual measurement system; Vision measurement system for shape measurement; robot for adjusting the pose of the vision measurement system; laser tracker for global monitoring and large complex components to be measured.
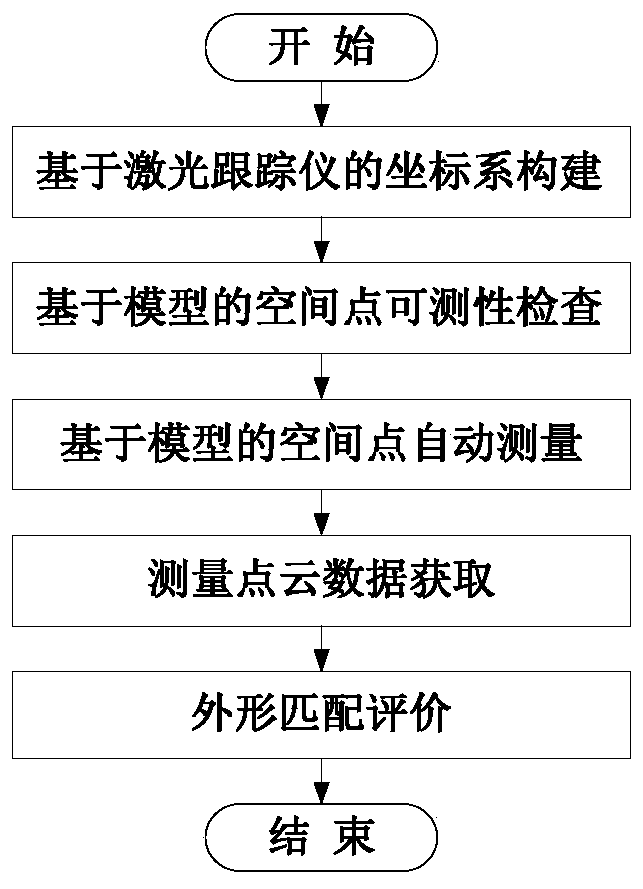
[0048] Such as figure 2 As shown, the present invention proposes a method for reconstructing the shape of a large-scale component of a mobile detection robot based on a laser tracker, including the following steps:
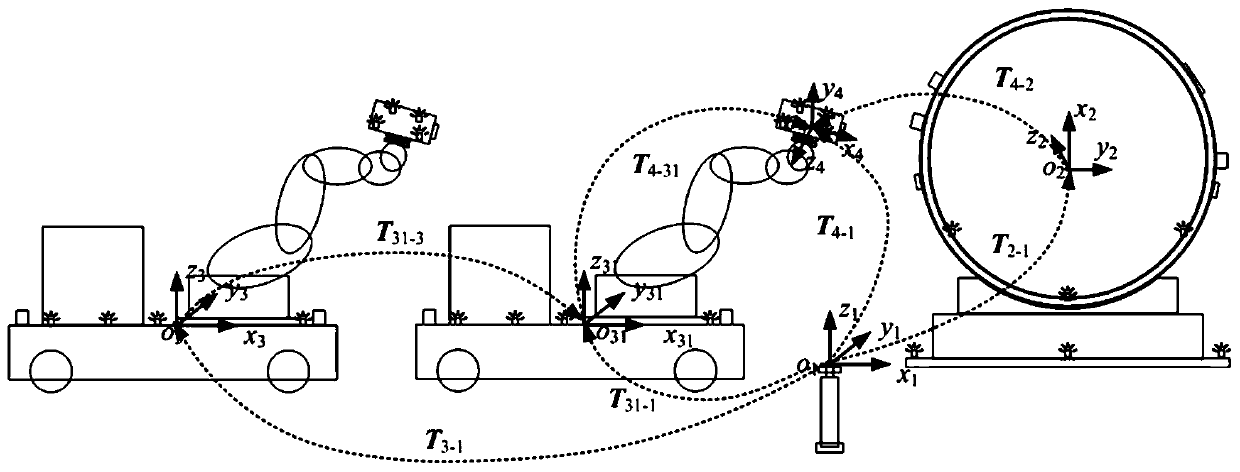
[0049] (1) Build different coordinate systems based on the laser tracker;
[0050] Under the coordinate system of the laser tracker, the coordinate system of the omnidirectional mobile platform, the reference coordinate system and the coordi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More