

Ship navigation automatic collision avoidance route planning method and model
A route planning and collision avoidance technology, applied in non-electric variable control, two-dimensional position/course control, vehicle position/route/altitude control, etc., can solve the problems of reducing the benefit of ECDIS navigation aids and increasing human errors, and achieve Effects that are easy to scale up, reduce impact, and have a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific example
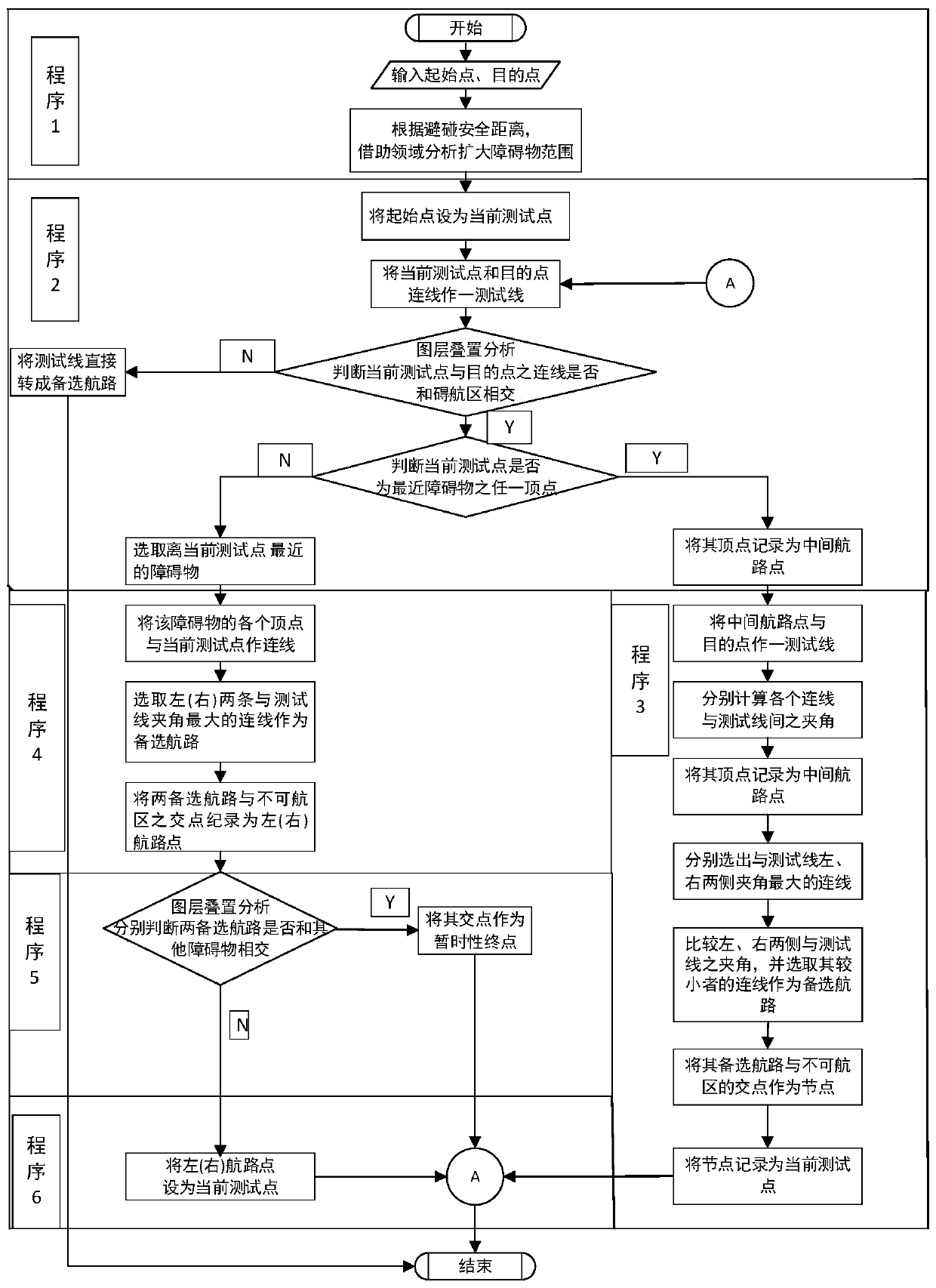
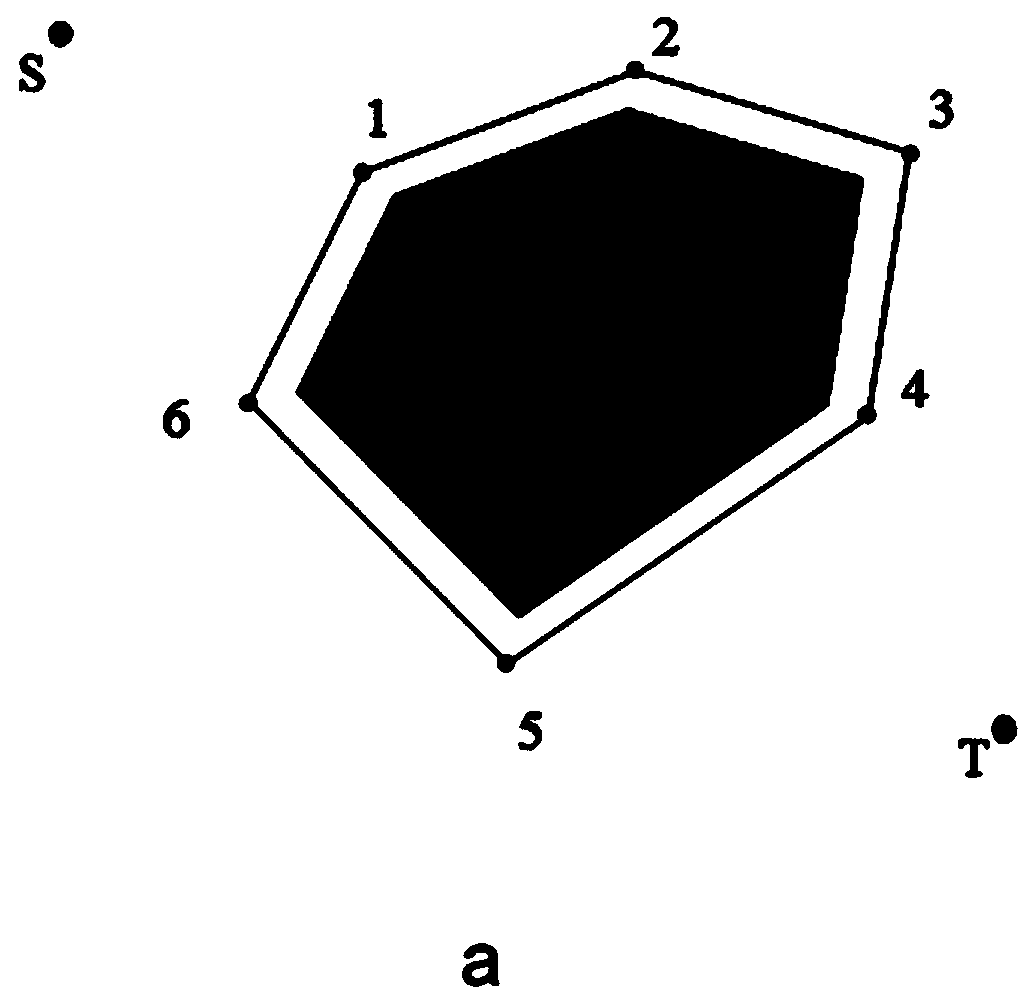
[0053] Step 1: If figure 2 As shown in (a), a certain initial route S-T (the shortest voyage distance of the rhumb line adopted between two points on the Maxwell chart) passes through an obstacle A, input the safety distance for collision avoidance, and use the domain analysis function of the GIS system to expand the obstacle The range of objects becomes obstacle A whose vertex is 1-2-3-4-5-6, and then enters step 2.
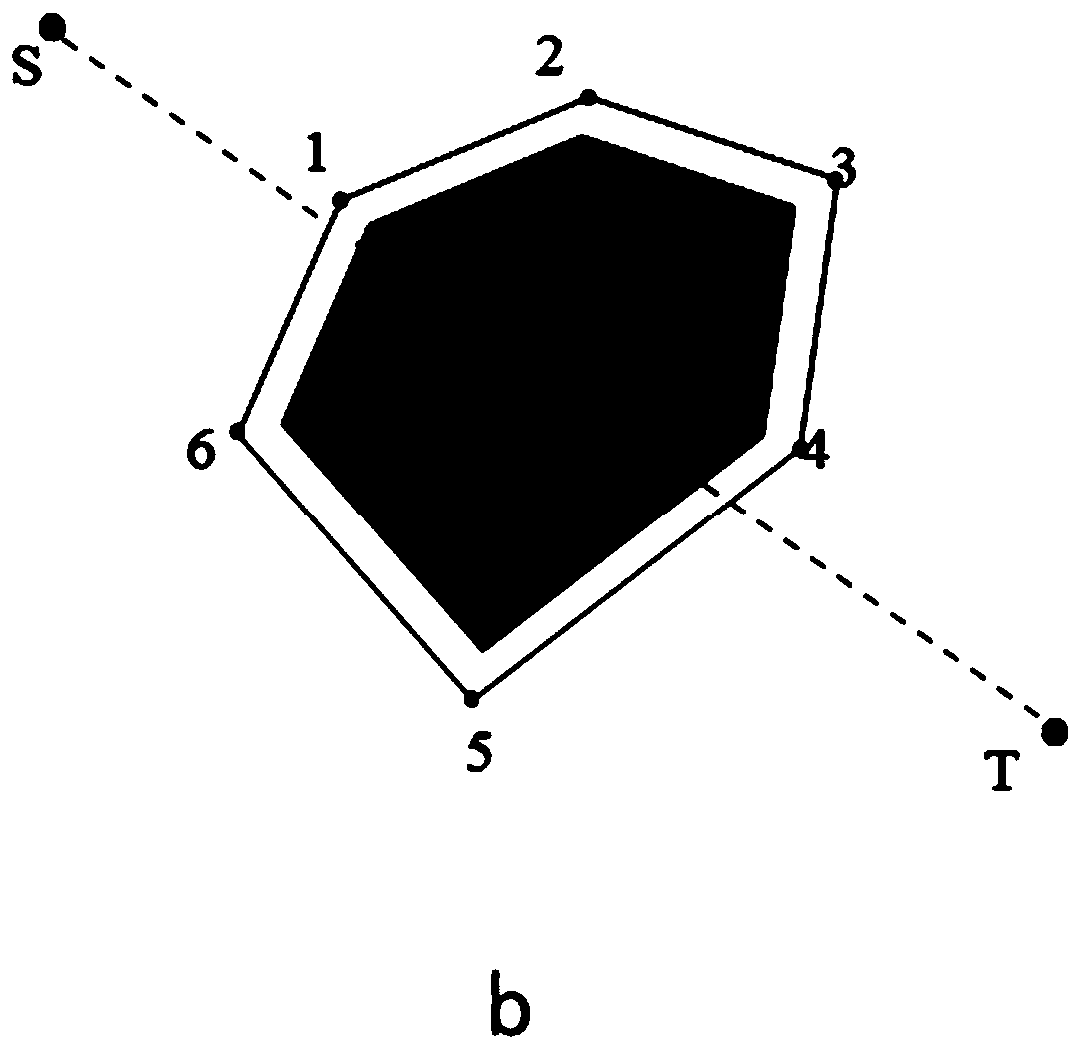
[0054] Step 2: Set the start point S and the end point T as the current test point and the destination point respectively, and establish a connection line between the two points, which is the S-T test line such as image 3 (b) shown. After the GIS layer overlay analysis confirms that there is an intersection between the test line and obstacle A, then it is judged that the current test point S is not any vertex on the boundary of the nearest obstacle A, and then enter step 4.
[0055] Step 3: Connect the vertices on the boundary of the obstacle A from point S ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More