

Biped robot sole structure with rapid shock absorption and road surface adaptability
A biped robot and adaptability technology, applied in the field of robotics, can solve the problems that robots are difficult to have effective cushioning and shock absorption road adaptability, and achieve the effects of improving walking performance, increasing effective ground contact area, and reducing control difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with accompanying drawing.
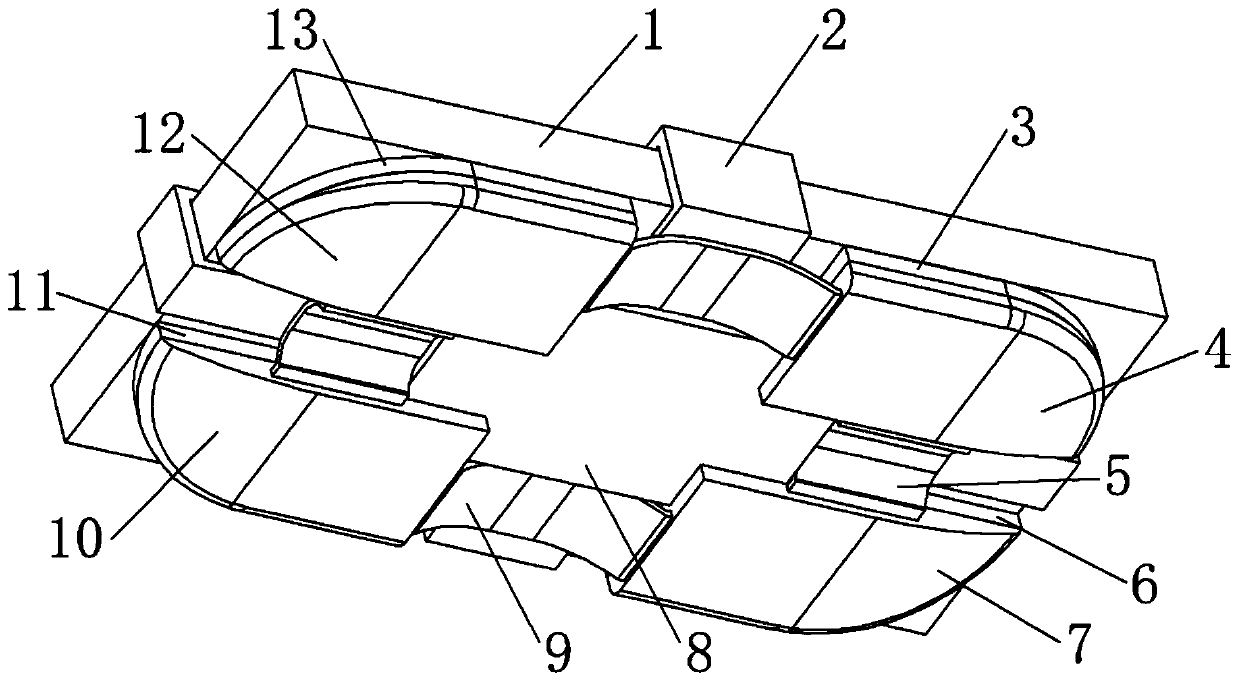
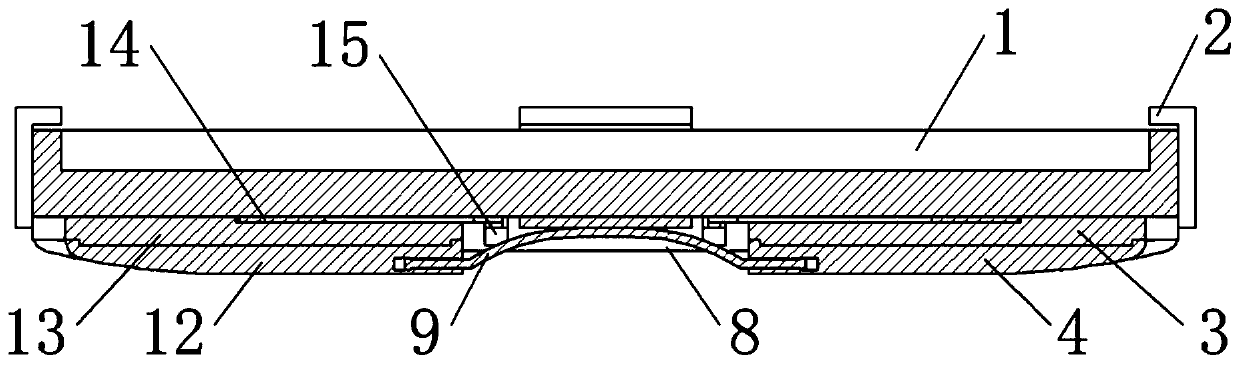
[0030] refer to Figure 1-2 : the plantar mechanism of the flat foot of the humanoid robot, including the original flat foot 1, cage 8, longitudinal arch mechanism, transverse arch mechanism and four plantar modules of the robot; the four sides of the cage 8 are installed The buckle 2 is fixedly connected with the flat foot 1, and the sole module is composed of a wear-resistant anti-skid layer in contact with the ground and a buffer and shock-absorbing layer fixedly connected with the flat foot 1, and the four sole modules are fixed on the flat foot 1. On the four corners, the sole modules are connected by the arch mechanism. According to the position of the modules on the soles of the feet, they are divided into the upper layer of the inner forefoot module 3, the lower layer of the inner forefoot module 4, the upper layer of the outer forefoot module 6, and the outer foref...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More