

Constraint compliance stability control method for space double-arm robot
A stable control method and technology of space robots, which are applied in the directions of space navigation equipment, transportation and packaging, tools, etc., to achieve the effect of improving reliability, restraint, compliance and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The following describes the embodiments of the present invention in detail, and the embodiments are illustrative and intended to explain the present invention, but should not be construed as limiting the present invention.
[0030] In this embodiment, the principle and stability proof of the constrained compliant and stable control method of the space dual-arm robot proposed by the present invention is given, including deriving the dynamic model of the space dual-arm robot; A performance-constrained tracking controller is designed to achieve constrained compliance and stability for spatially non-cooperative targets.
[0031] Establish a space dual-arm robot dynamic model:
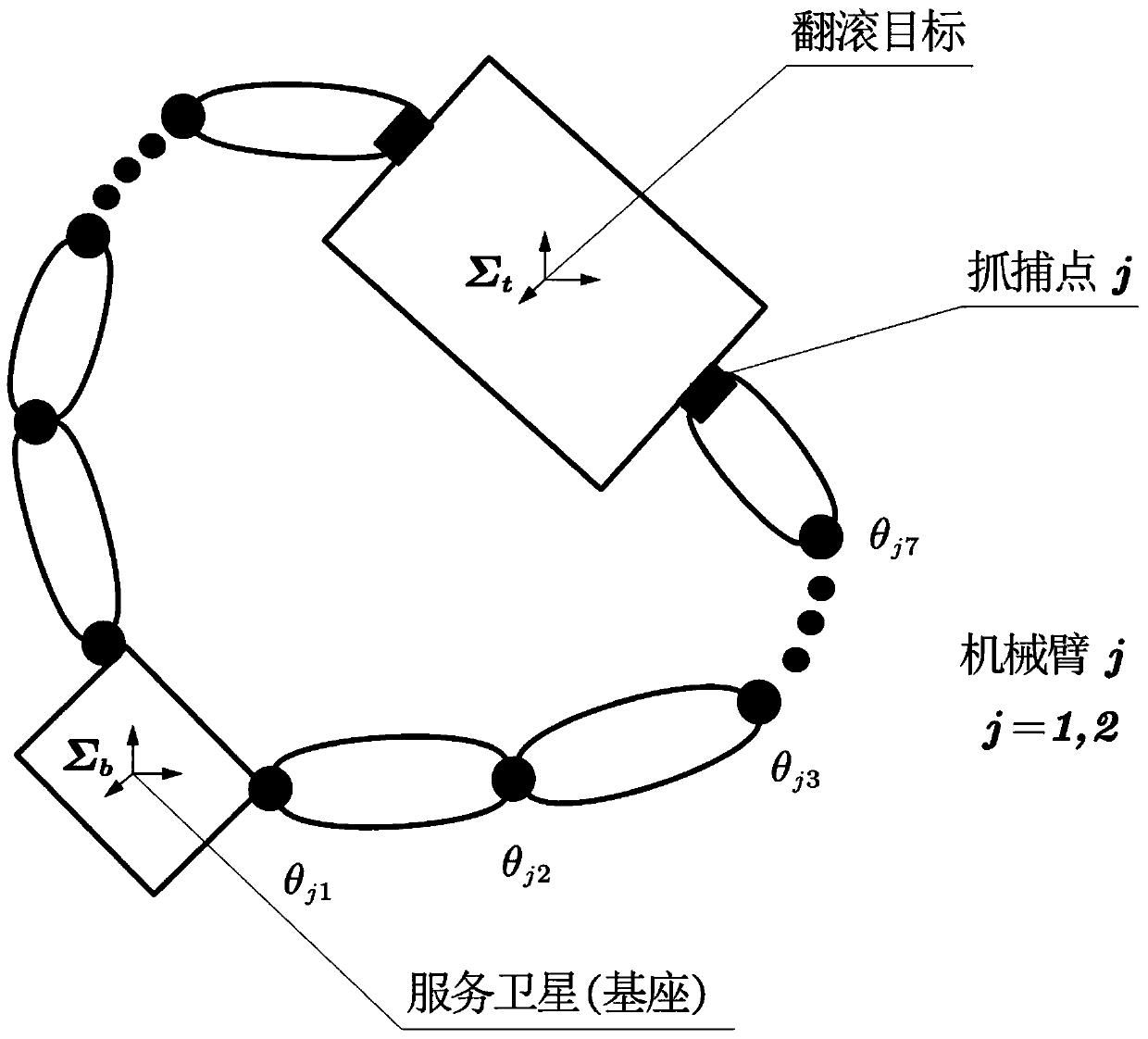
[0032] The tumbling target model can be simplified as a rigid body, and its dynamics can be expressed by a six-degree-of-freedom dynamic equation when the inertial parameters are known. Coordinate system ox t the y t z t is the body coordinate system defined on the target, where o is the center o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More