

Route planning method, route planning device, robot and medium
A technology for route planning and driving routes, which is applied in the field of image recognition and can solve problems such as small application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
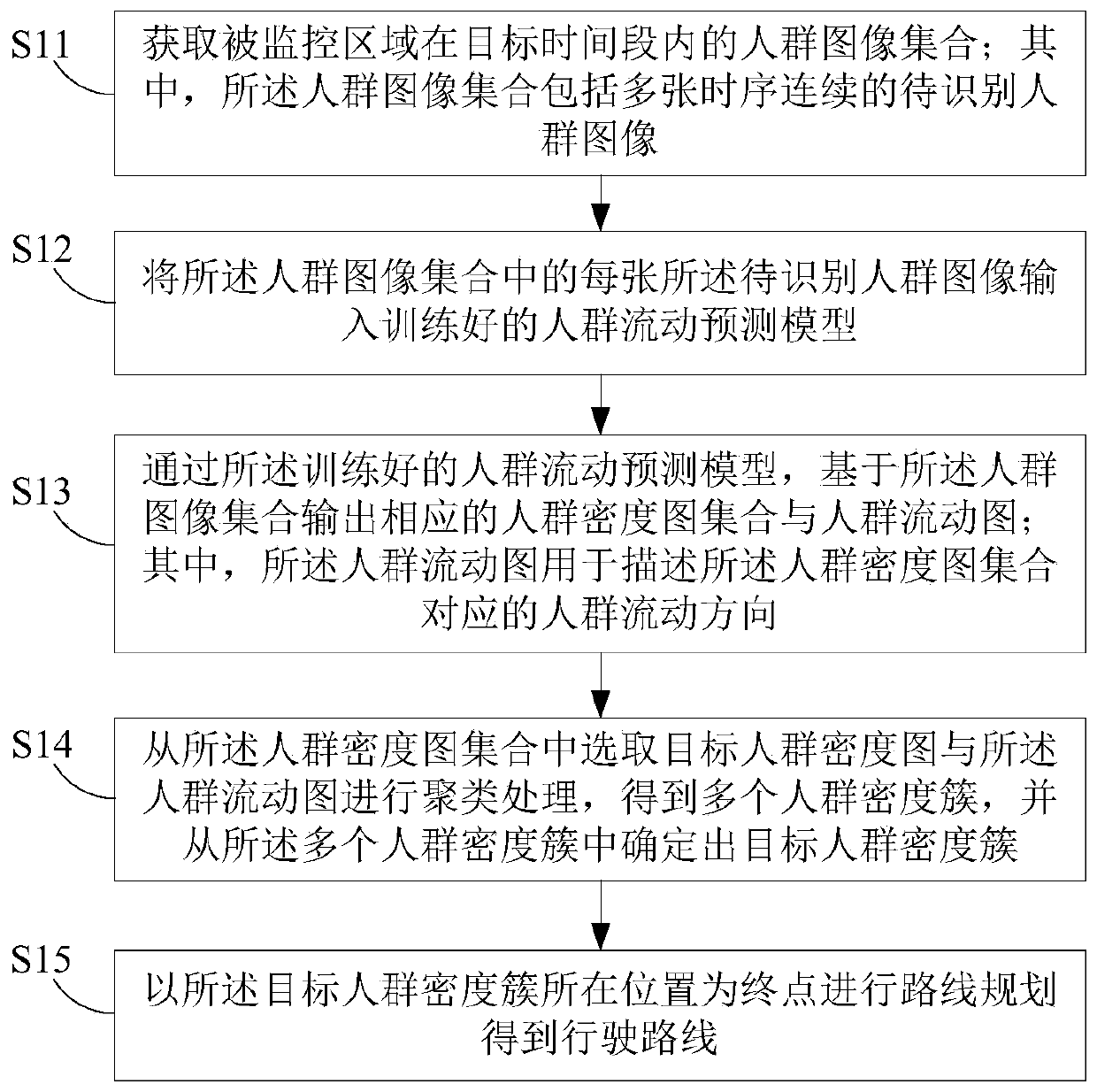
[0067] see figure 1 , figure 1 It is an implementation flow chart of a route planning method provided in the embodiment of this application. In this embodiment, the route planning method is used to plan the driving route of the robot, and its execution subject is the robot or the computer equipment configured on the robot, for example, a robot used to provide consultation or guide servers for pedestrians in public places.
[0068] Such as figure 1 The illustrated route planning method includes the following steps:
[0069] S11: Obtain a crowd image set in the monitored...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More