

Mobile robot wheel foot structure and control method thereof
A mobile robot and control method technology, applied in the field of robots, can solve the problems of low energy consumption of wheeled structures and poor adaptability to complex terrain, and achieve the effect of improving applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0009] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
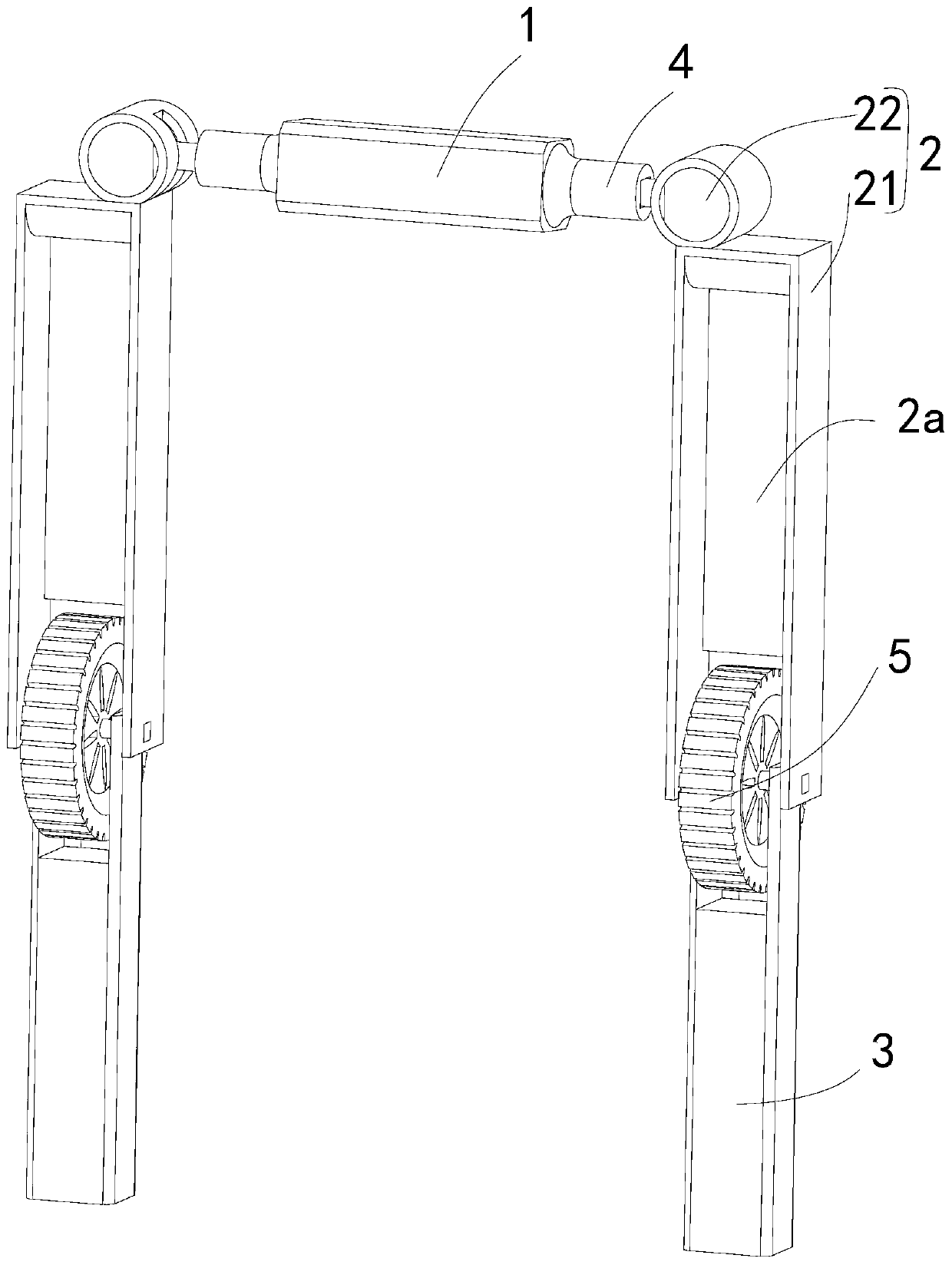
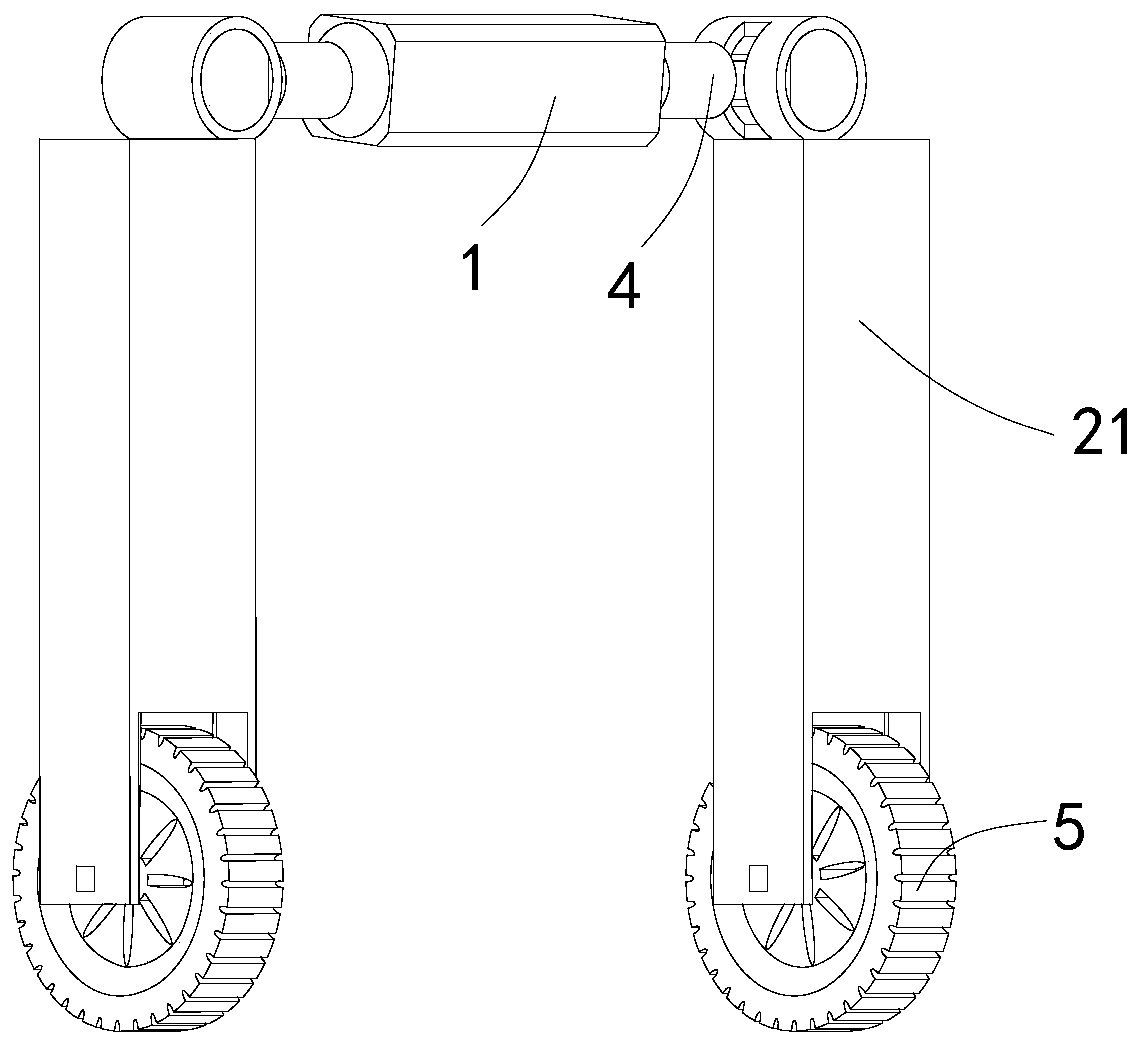
[0010] see figure 1 , figure 2 , the present embodiment provides a mobile robot wheel foot structure, including: a base 1, a thigh 2, a lower leg 3, a first drive mechanism 4, a second drive mechanism (not shown in the figure), a third drive mechanism (shown in the figure) Not shown in), roller 5.
[0011] There are two thighs 2, two first driving mechanisms 4, and the two first driving mechanisms 4 are respectively installed on both sides of the base 1, and the two first driving mechanisms 4 are one One corresponds to the driving connection of the two thighs 2, and each of the first driving me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More