

AUV three-dimensional airway planning method
A route planning, three-dimensional technology, applied in navigation, mapping and navigation, navigation calculation tools, etc., to achieve the effect of improving planning speed and planning quality, strong overall, and improving practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
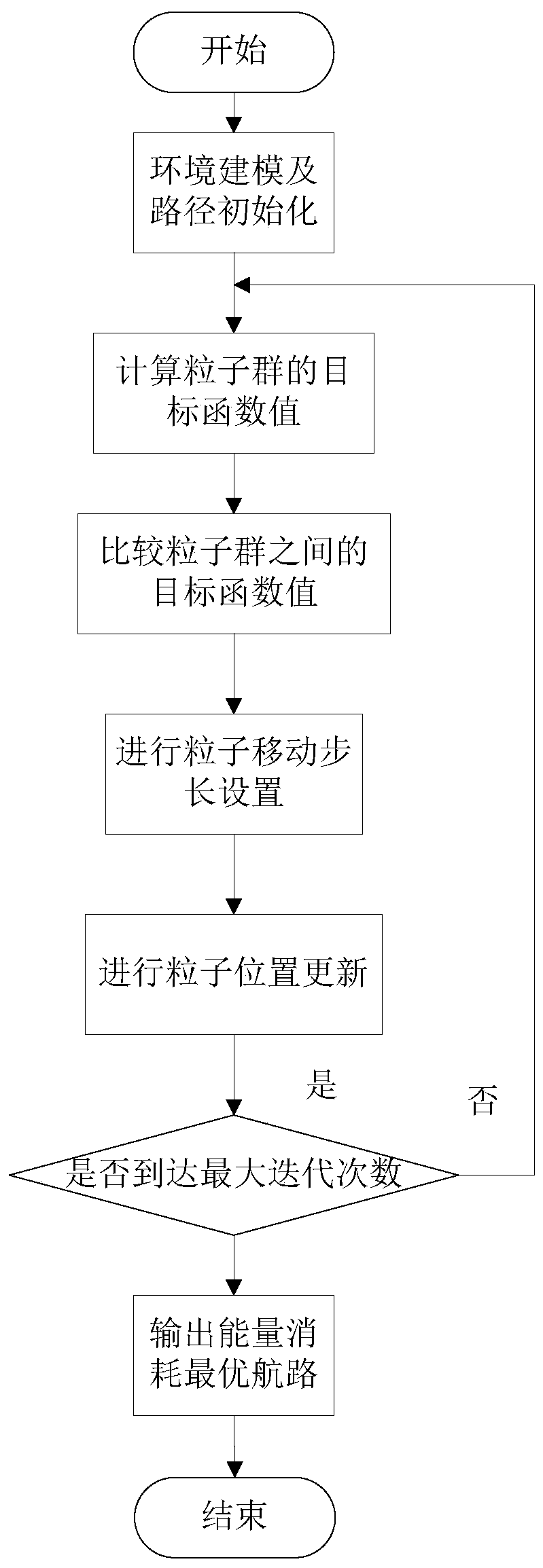
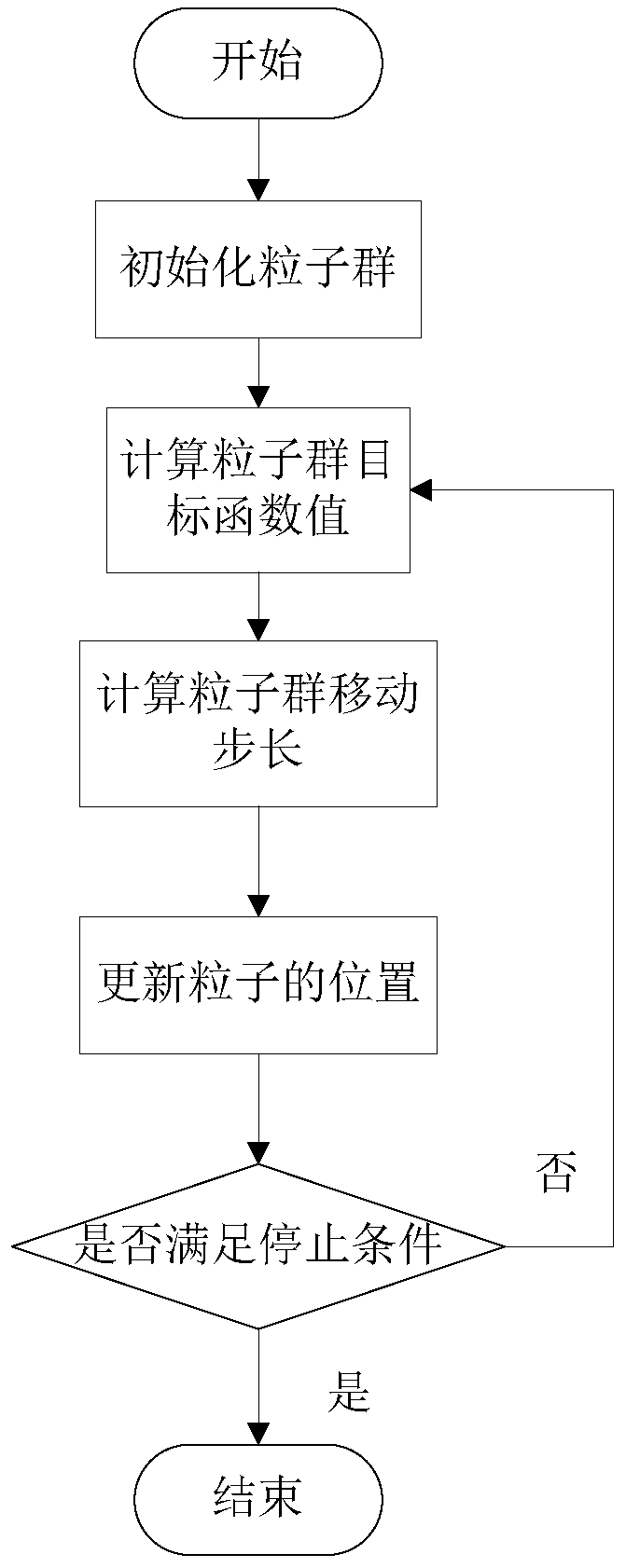
[0054] The steps of the present invention mainly include:
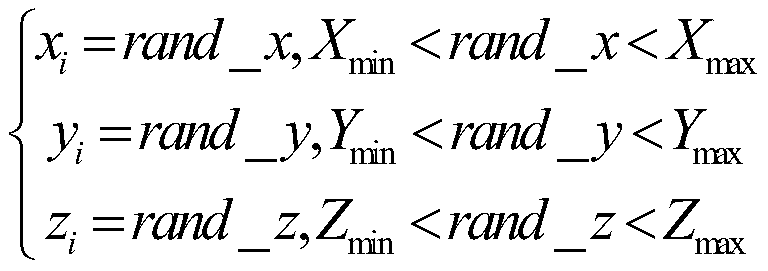
[0055] Step 1: 3D environment modeling and initialization of particle positions. According to the position of the starting point and the end point in the space, the scope of the navigation space is planned, and the particles are randomly distributed in the non-obstacle area to improve the convergence speed.
[0056] Step 2: Enter the penalty value setting of the obstacle. The penalty value in the obstacle is set to gradually decrease from the center position to both ends, so as to ensure that the particles can escape from the local optimum during the update process.
[0057] Step 3: Calculate the objective function value. The objective function value is composed of two parts, namely, energy consumption of the route and the penalty value of entering obstacles. Route energy cons...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More