

Dynamic obstacle tracking method based on sparse laser radar data
A technology of dynamic obstacles and lidar, which is applied to the re-radiation of electromagnetic waves, the use of re-radiation, measurement devices, etc., can solve the problems of sparse point cloud, small amount of data, and poor accuracy of processing results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
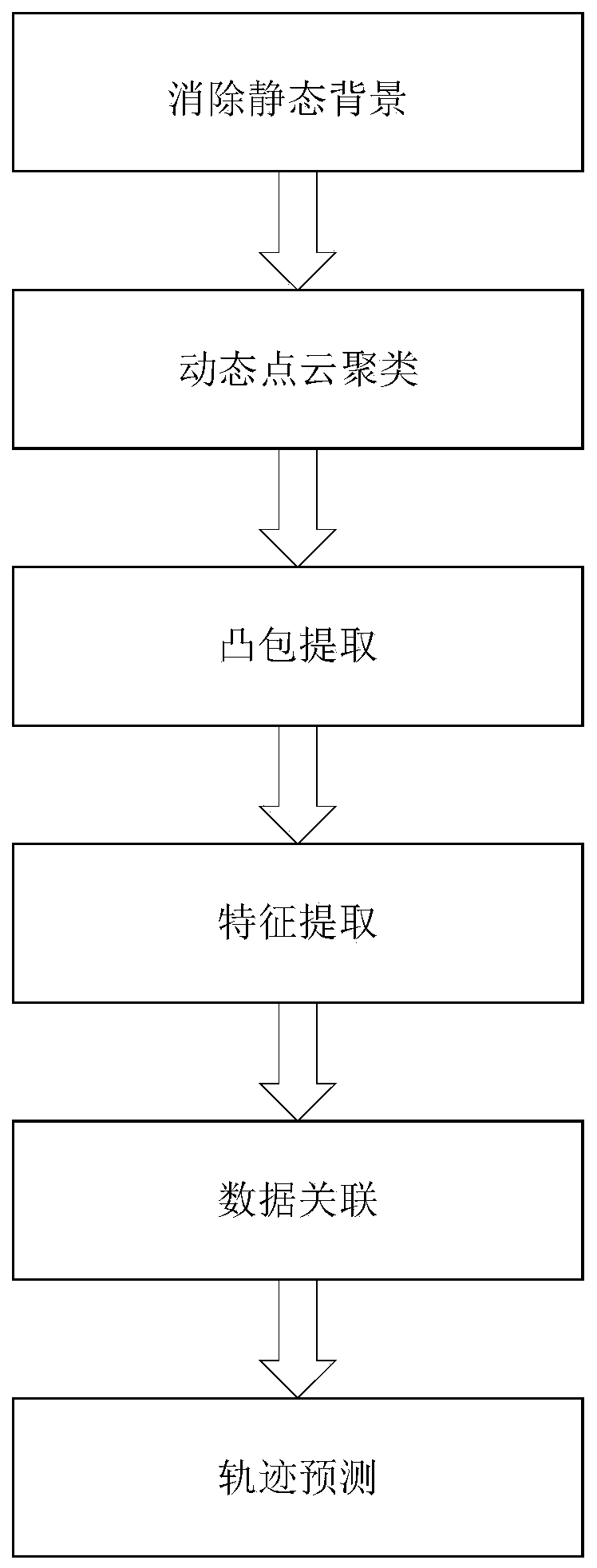
[0083] This embodiment provides a technical solution: a dynamic obstacle tracking method based on sparse lidar data, such as figure 1 shown, including the following steps:
[0084] Step One: Eliminate the Static Background
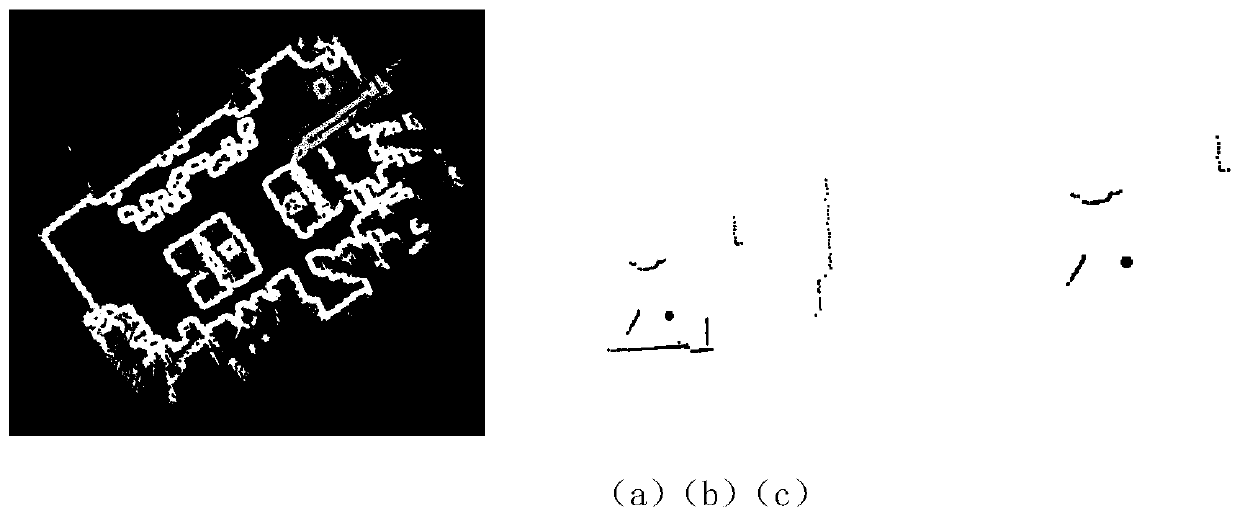
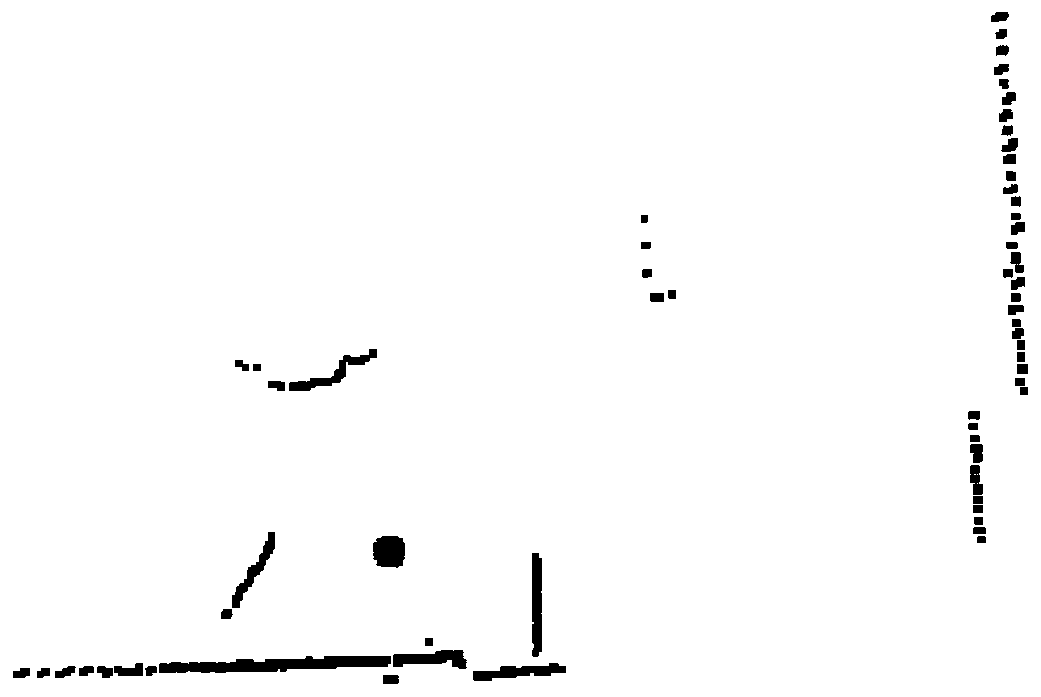
[0085] The data collected by lidar includes static obstacles and dynamic obstacles. For the tracking of dynamic obstacles, the static obstacle point cloud is noise, and this part of the point cloud must be removed. The general process of background elimination based on 3D radar is as follows: first determine the drivable area, then delete the ground point cloud and the point cloud exceeding a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More