Ship bottom cleaning submersible system based on cavitation jet technology, and using method thereof
A jet technology and submersible technology, applied in the field of underwater robot system, can solve the problems of low work efficiency, many parts, complicated assembly, etc., and achieve the effect of saving labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
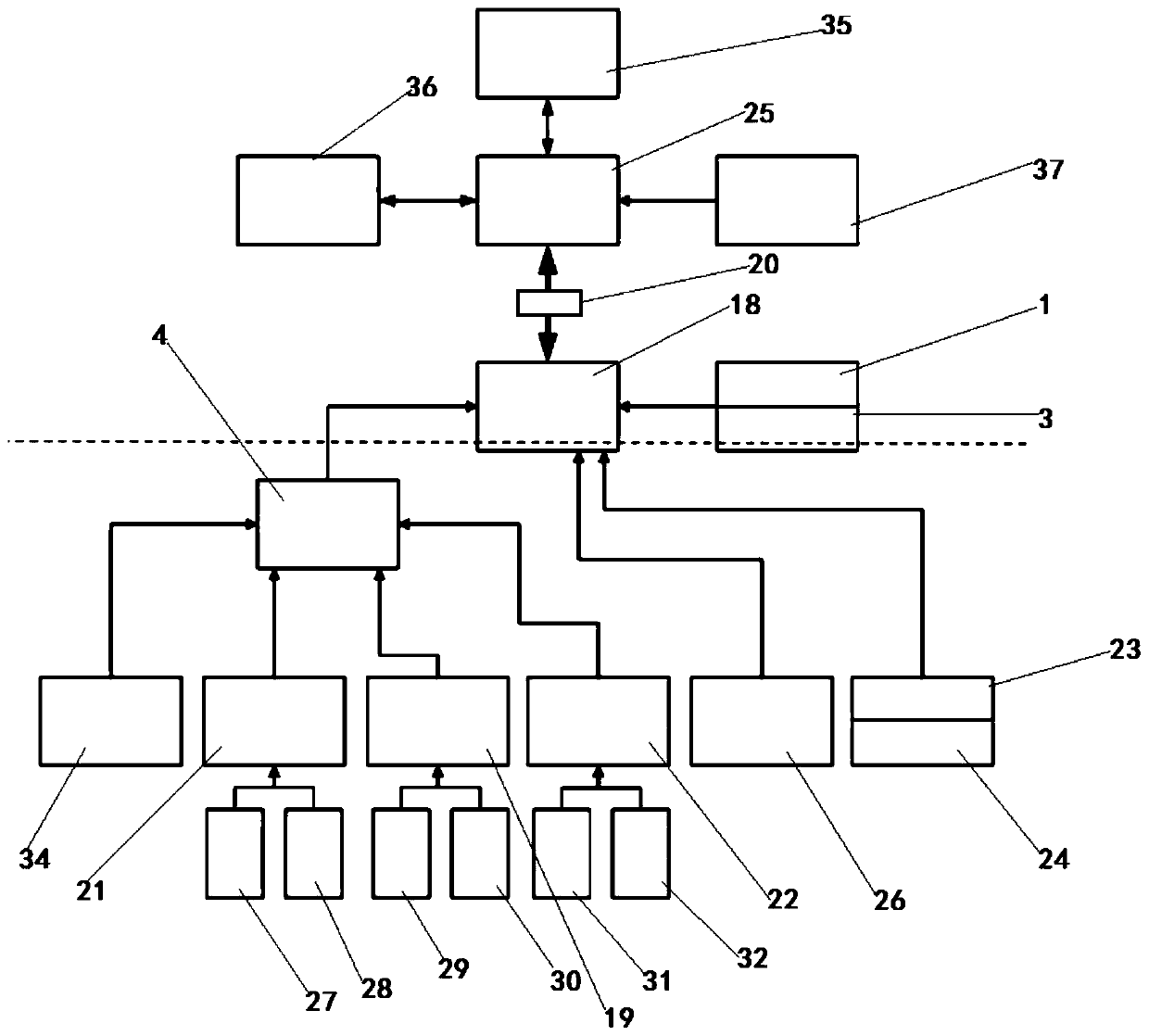
[0037] A ship bottom cleaning submersible system based on cavitation jet technology, i.e. intelligent ship cleaning underwater robot ROV system, comprising underwater ROV body unit 18, electric control cabin 4, thruster 34, pan-tilt 19 (equipped with optical camera and LED light), umbilical cable 20, attitude and ranging system 21, basic sensors 22, cavitation cleaning equipment 23 and roller module 24, and deck control unit 25, etc.
[0038] The deck control unit 25 is arranged on the deck of the mother ship, and is connected with the underwater ROV body unit 18 through the umbilical cable 20 .
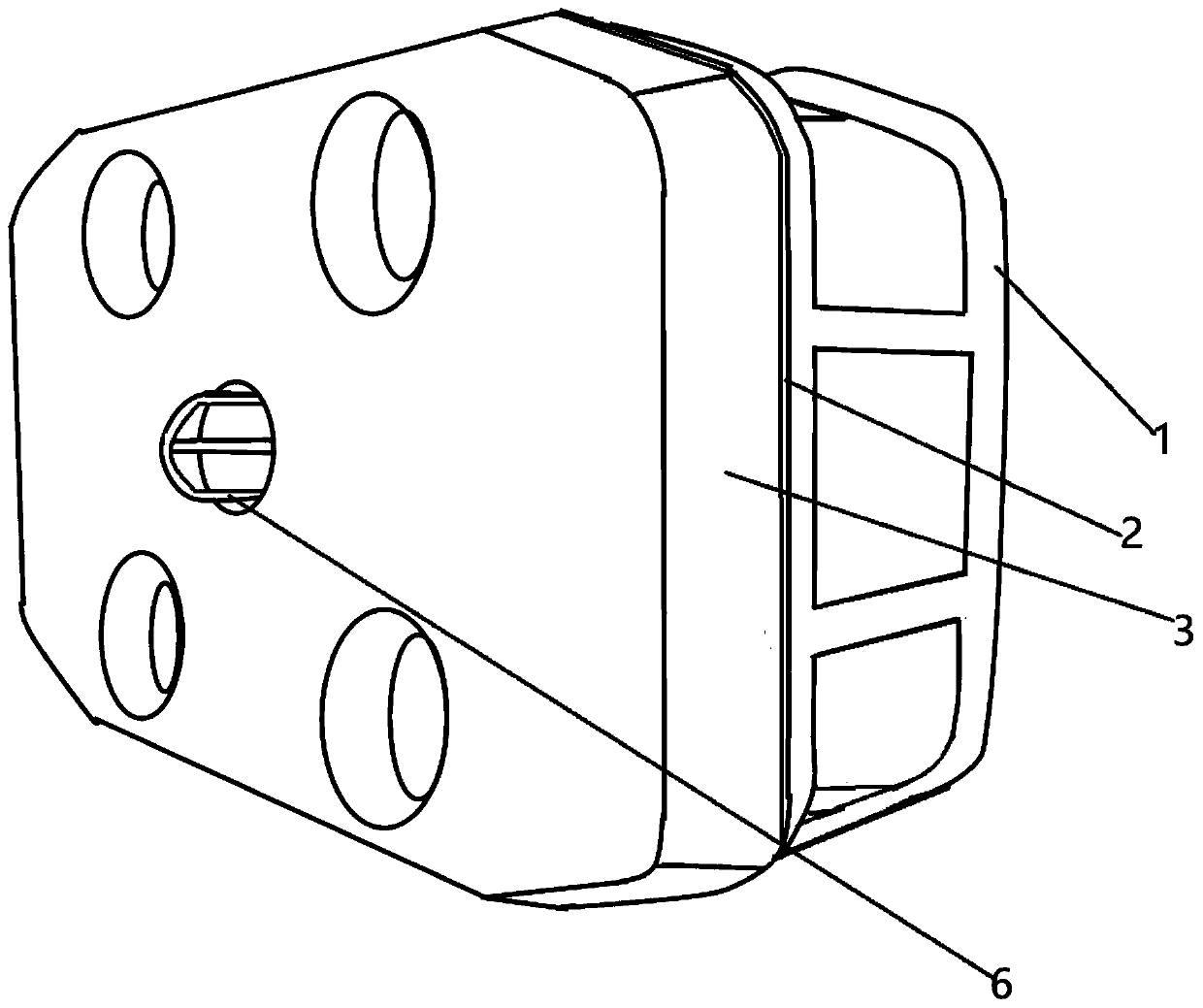
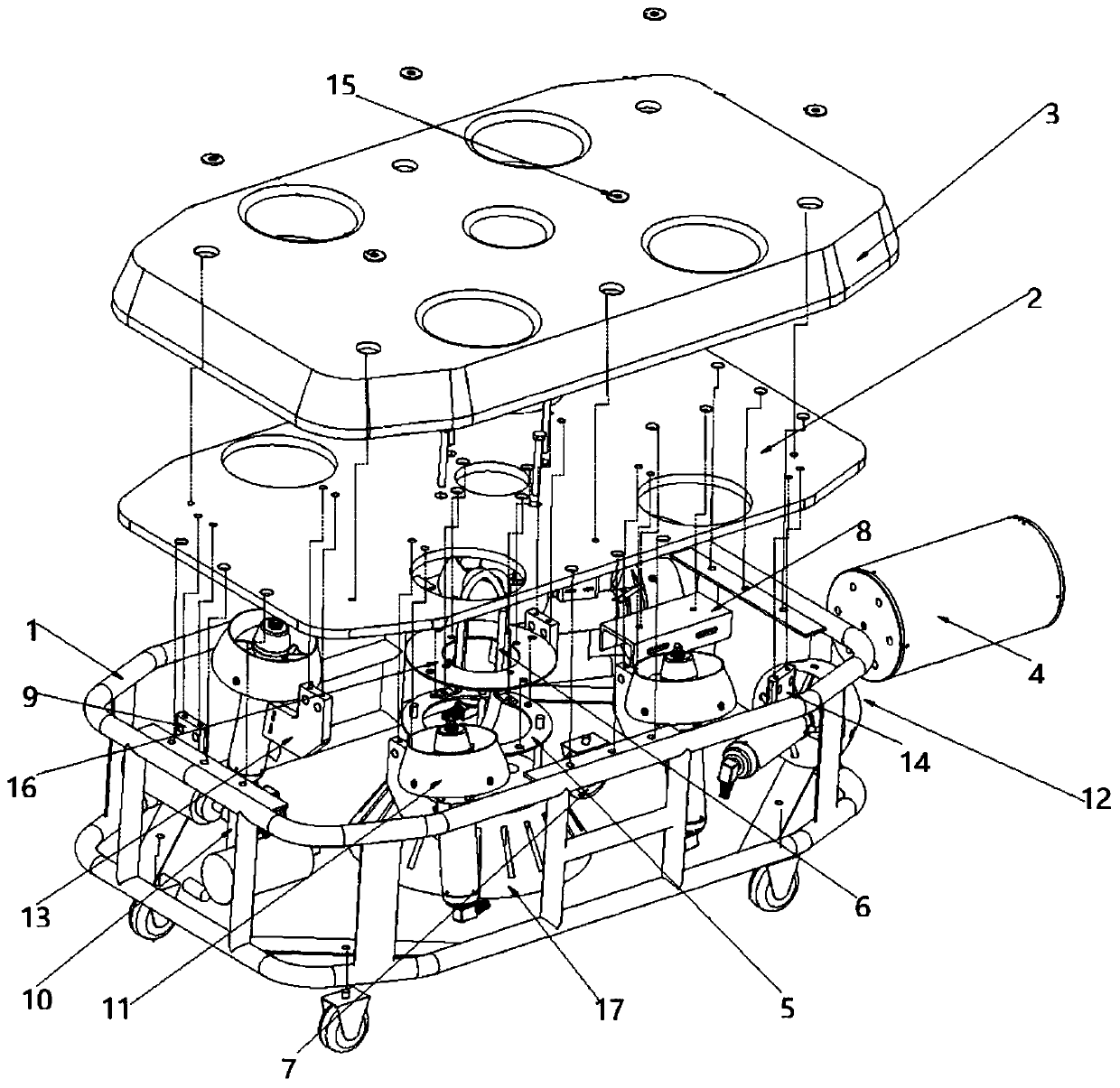
[0039] The underwater ROV body unit 18 is provided with a main structural frame 1 and a buoyancy material 3 , as well as several spare expansion interfaces 26 . The electronic control cabin 4 is installed inside the main structural frame 1 of the underwater ROV body unit 18, and the propeller 34, the pan / tilt 19, the attitude and ranging system 21, the basic sensor 22, the cavitation...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap