

Building outer wall spraying device with positioning function
A technology for building exterior walls and spraying devices, which is applied to buildings and building structures, etc., can solve the problems of low manual operation efficiency and uneven spraying quality of building exterior walls.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
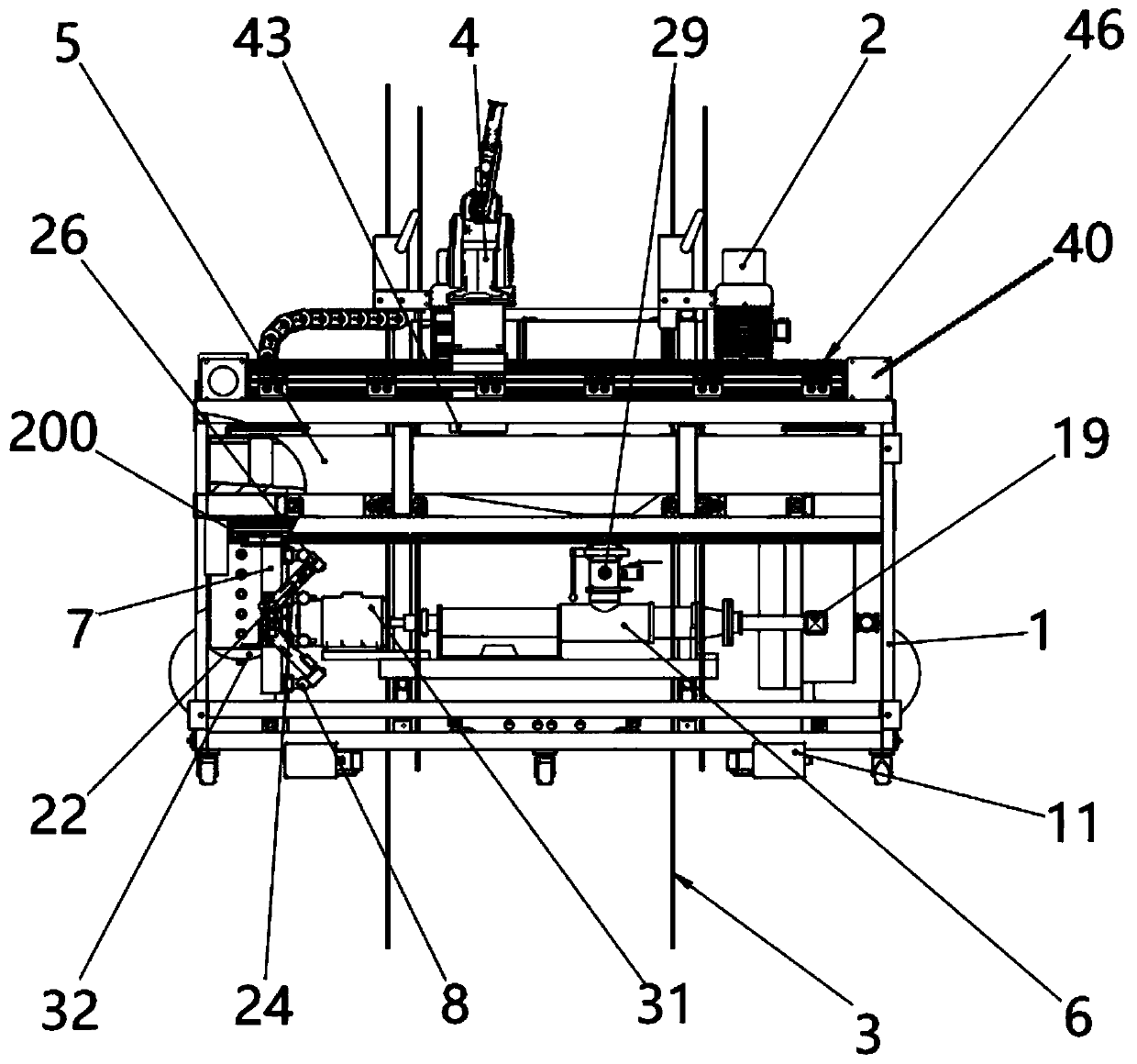
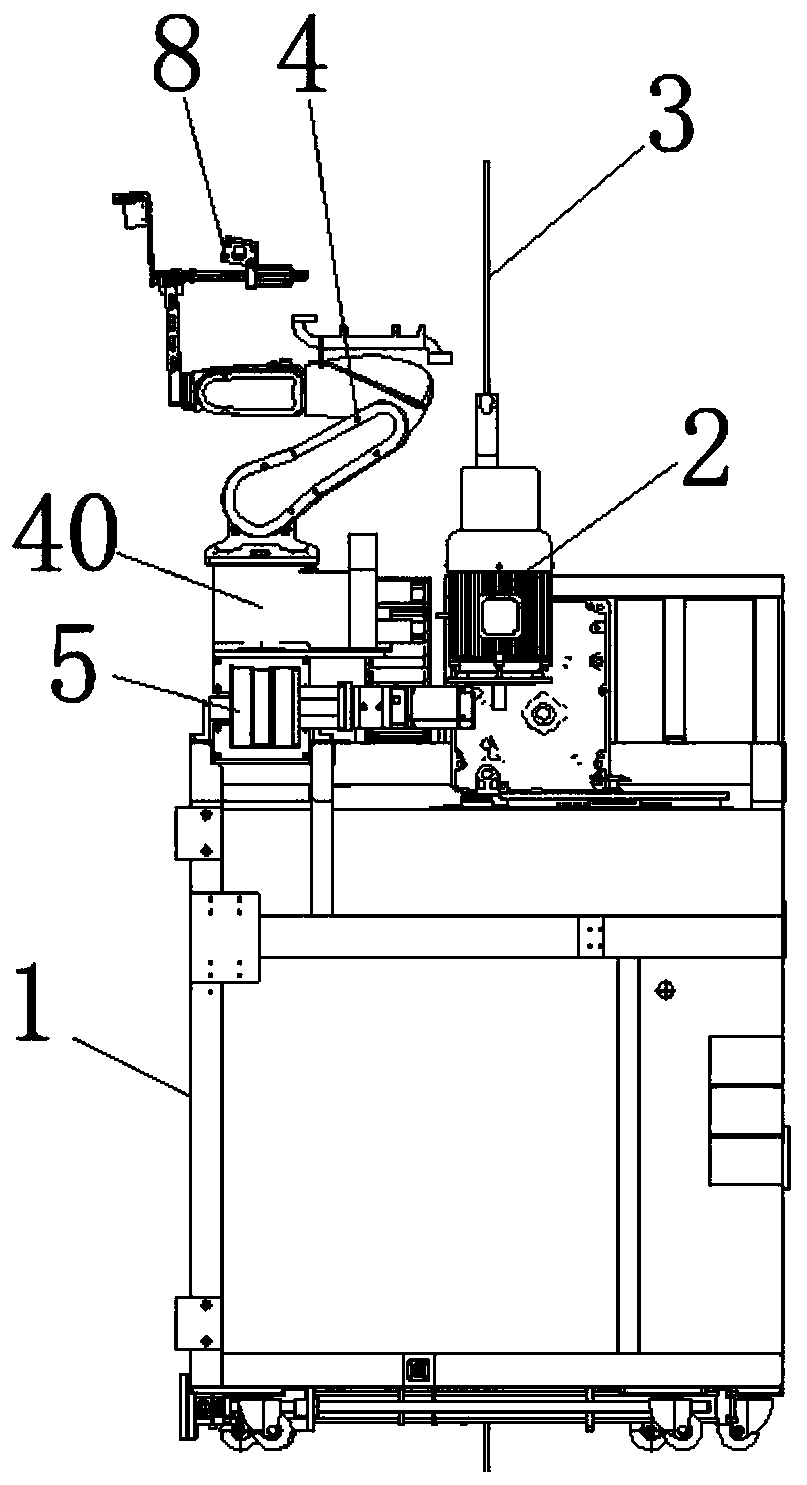
[0033] Such as figure 1 and figure 2 As shown, a building exterior wall spraying device with a positioning function includes a frame body 1, which exists as an installation carrier, rollers are installed on the bottom of the frame body 1, and a climbing hoist 2 is installed on the frame body 1. In order to maintain balance , There are at least two climbing hoists 2, preferably two in this embodiment, the climbing hoists 2 are wound on the steel rope 3, so that the frame body 1 is suspended by the steel rope 3. The climbing hoist 2 includes an encoder, which is used to control the number of turns of the climbing hoist 2, and then control the lifting height. The climbing hoist is connected with an encoder, and the encoder is connected to the controller; the spraying robot The spray gun on the output end is provided with a color recognition system and a distance detection system; the color recognition system and the distance detection system are connected with the controller. ...
Embodiment 2
[0044] In Embodiment 1, the spraying robot 4 is fixedly installed, so the working range of its output end is limited, and it is difficult to achieve a wide range of work; usually, this problem is solved by making the spraying robot 4 move relative to the frame body 1; but, The spraying robot 4 in motion will change the center of gravity of the spraying device, and its inertia will also cause the spraying device to shake, which will adversely affect the spraying quality.
[0045] Therefore, on the basis of Embodiment 1, as Figure 4 and Figure 5 Shown, in this embodiment, also comprise robot motion balance assembly 40, robot motion balance assembly 40 comprises motion mechanism and balance mechanism; Wherein, balance mechanism comprises linear slide rail 41, slide block 42 and counterweight 43; Linear slide rail 41 is installed on the frame body 1. There are two linear slide rails 41. The two linear slide rails 41 are opposite and parallel to each other. Usually, the linear s...
Embodiment 3
[0051] It differs from Embodiment 2 only in that: in this embodiment, the motion mechanism is a chain transmission mechanism, and the chain transmission mechanism includes two sprockets of the same size and a chain wound on the two sprockets; the two sprockets of the chain The straight sides are the two output terminals mentioned above. The above-mentioned driving motor 44 is connected to one of the sprockets as power input.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More