

Self-obstacle-crossing robot and control method
A control method and robot technology, applied in the field of robots, can solve the problems of reducing the efficiency of obstacle crossing, poor applicability, and difficulty in turning the double track structure, and achieve the effect of improving the efficiency of obstacle crossing and prolonging the service life.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
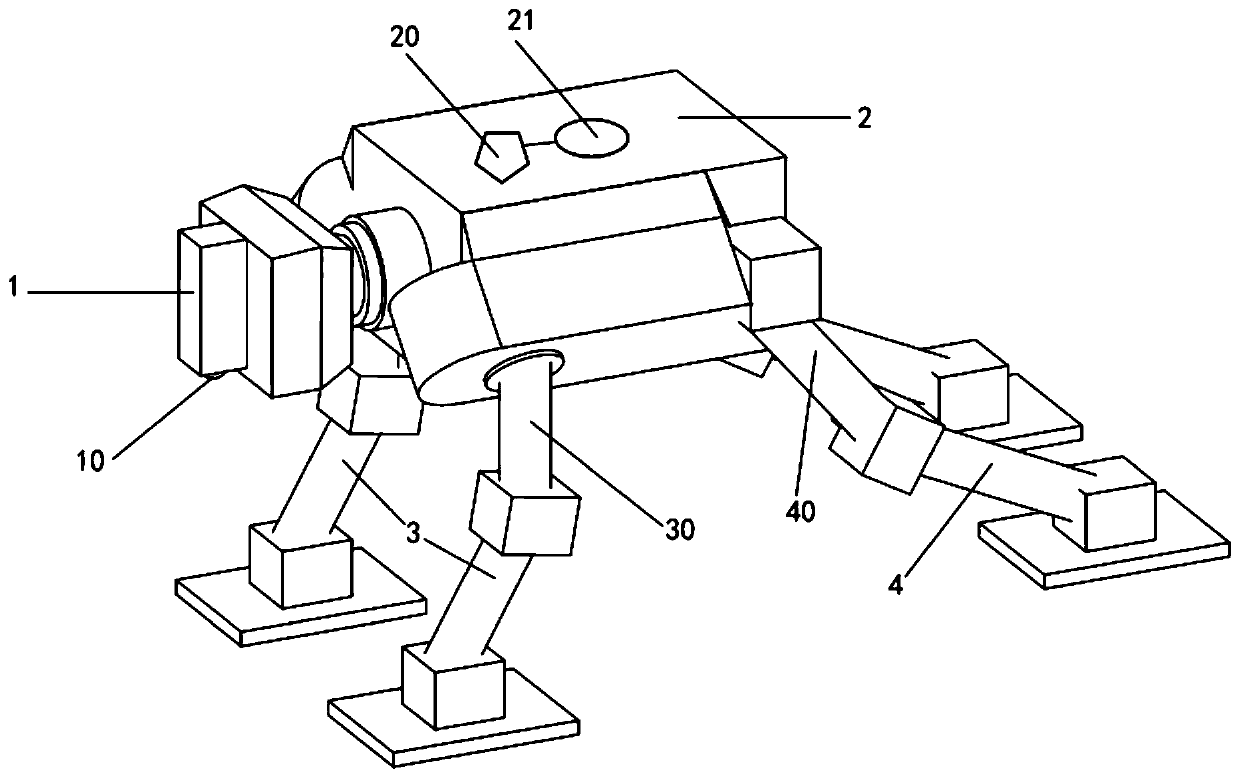
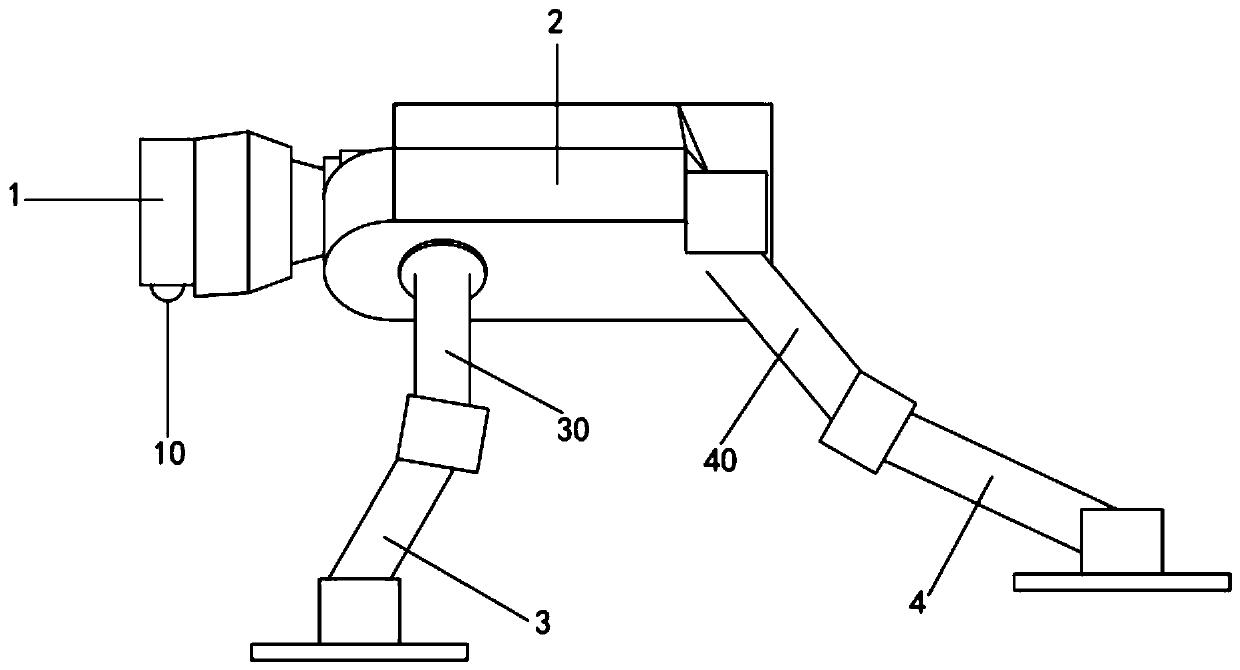
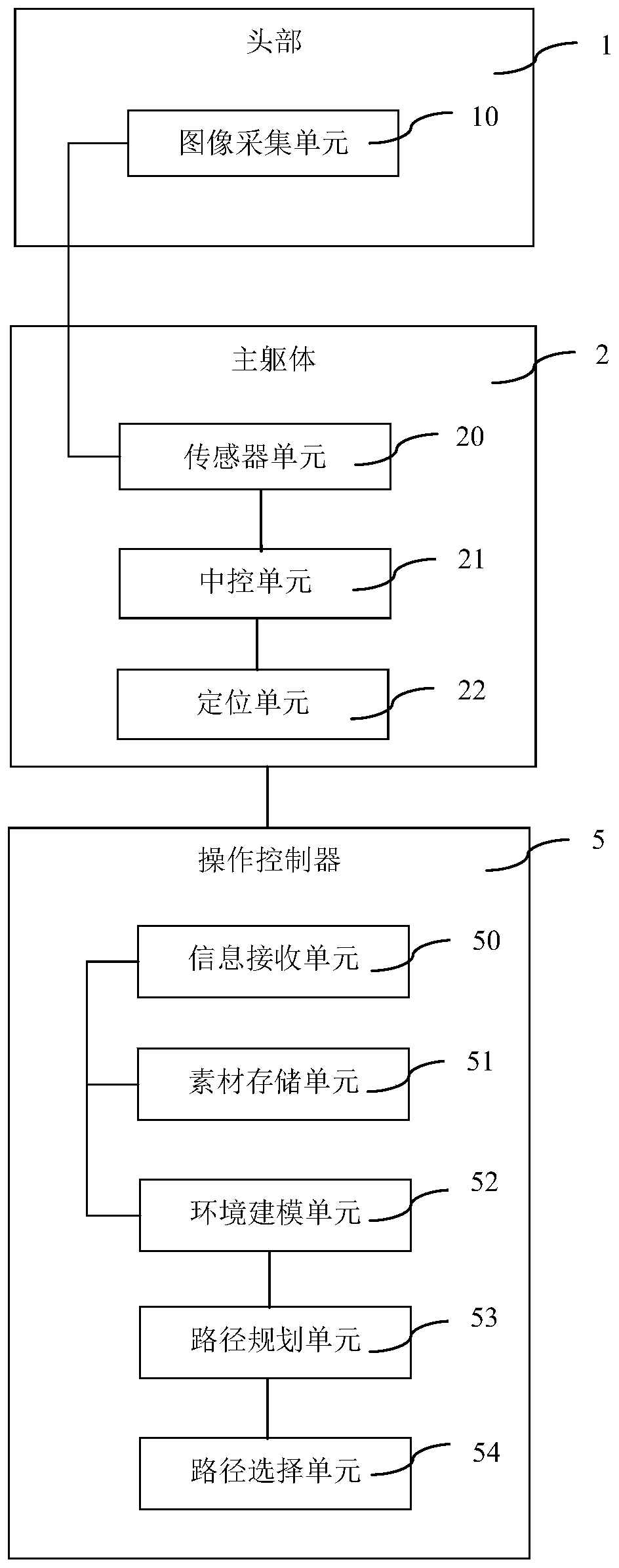
[0079] In a preferred embodiment, combining figure 1 , 2 , 3, the self-obstacle-crossing robot mainly includes a head 1, a main body 2, two front climbing limbs 3, two rear climbing limbs 4, and an image acquisition unit 10 arranged on the head 1, for example, may be a fisheye camera , used to collect the environment information around the obstacle-crossing robot, the environment information includes the image information, distance information and size information of the surrounding environment, and identify the real-time relative position status of the obstacle-crossing robot according to the image information, distance information and size information. Scalably, the image acquisition unit 10 can also be a dual fisheye camera, for example, respectively arranged at the front and rear of the head, so as to be able to collect all the environmental information around the obstacle-surpassing robot.
[0080] Further, the main body 2, as the information interaction center of the se...
Embodiment 2
[0090] In a preferred embodiment, as Figure 4 As shown, the main body 2 is also provided with a positioning unit 22 connected to the central control unit 21 for real-time positioning of the self-obstacle-crossing robot and sending the output real-time position information to the central control unit 21;
[0091] Operation controller 5 also includes:
[0092] A position update unit 56, respectively connected to the positioning unit 22 and the path planning unit 53, for updating the real-time position information of the obstacle-crossing robot in real time, and sending it to the path planning unit 53;
[0093] The path planning unit 53 is also used to receive real-time location information and status information, so as to re-plan at least one running track;
[0094] The path selection unit 54 is also used to select an optimal running trajectory according to preset running objectives and constraints.
[0095] In this embodiment, the running trajectory can be dynamically planne...
Embodiment 3
[0098] Scalably, for the self-obstacle-surmounting robot to be able to operate in a complex and narrow environment, in the process of obstacle-surmounting, different obstacle-surmounting postures can be used to overcome obstacles, for example, the following examples are used to illustrate. In this example, if Figure 5 As shown, the central control unit 21 also includes:
[0099] A configuration unit 210, which pre-configures obstacle-crossing postures of different obstacles;
[0100] A gesture calling unit 211, connected to the image acquisition unit 10, the sensor unit 20 and the configuration unit 21, is used to receive environmental information and status information from the obstacle-crossing robot, and call the corresponding obstacle-crossing robot according to the environmental information and status information. posture, and output a control instruction;
[0101] An obstacle control unit 212, connected to the posture calling unit 211, is used to receive control instr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More