

Ball socket type two-degree-of-freedom variable-rigidity robot joint
A technology of robot joints and degrees of freedom, applied in the field of robotics, can solve the problem that flexibility is difficult to meet the requirements of human-machine integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with the accompanying drawings.
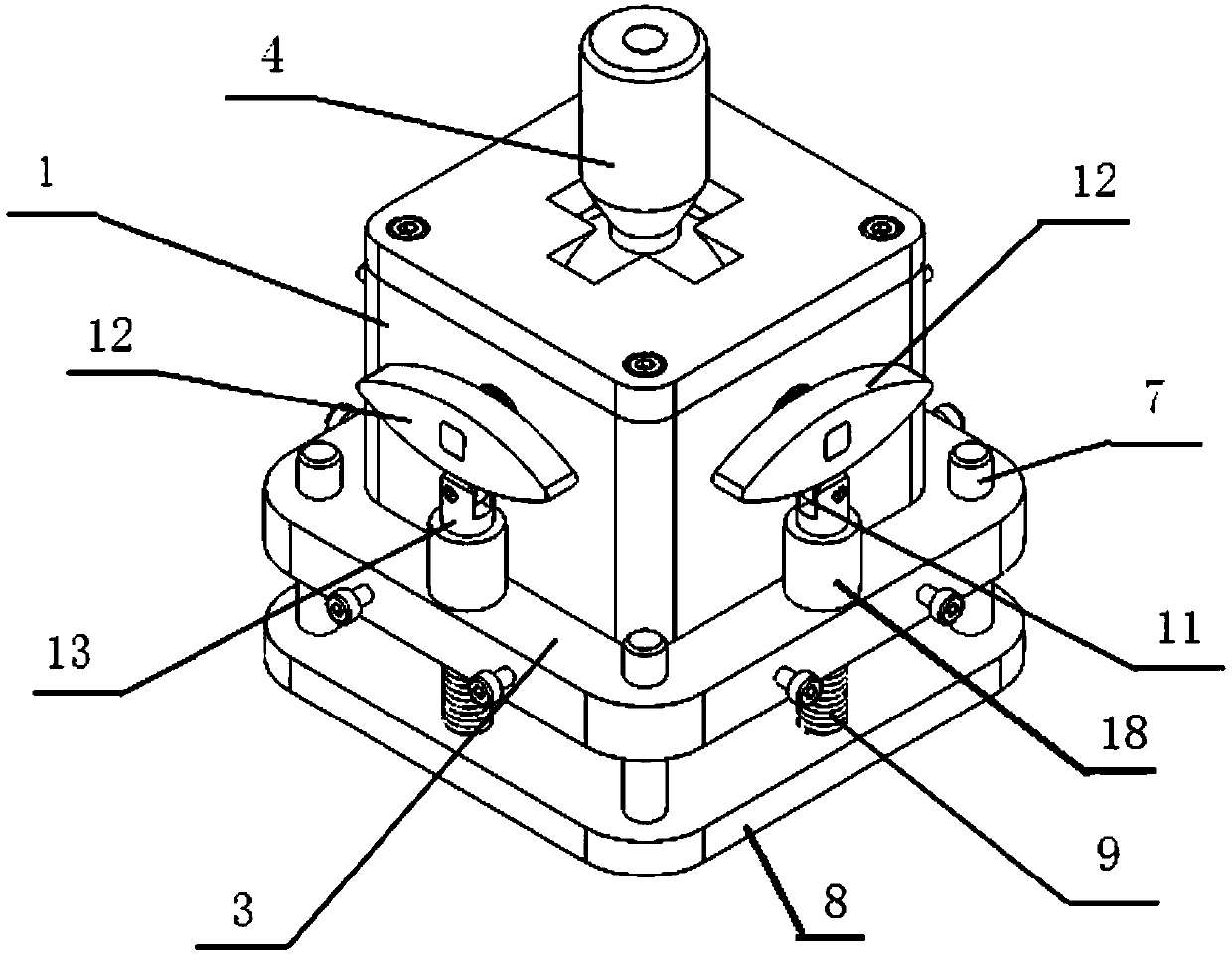
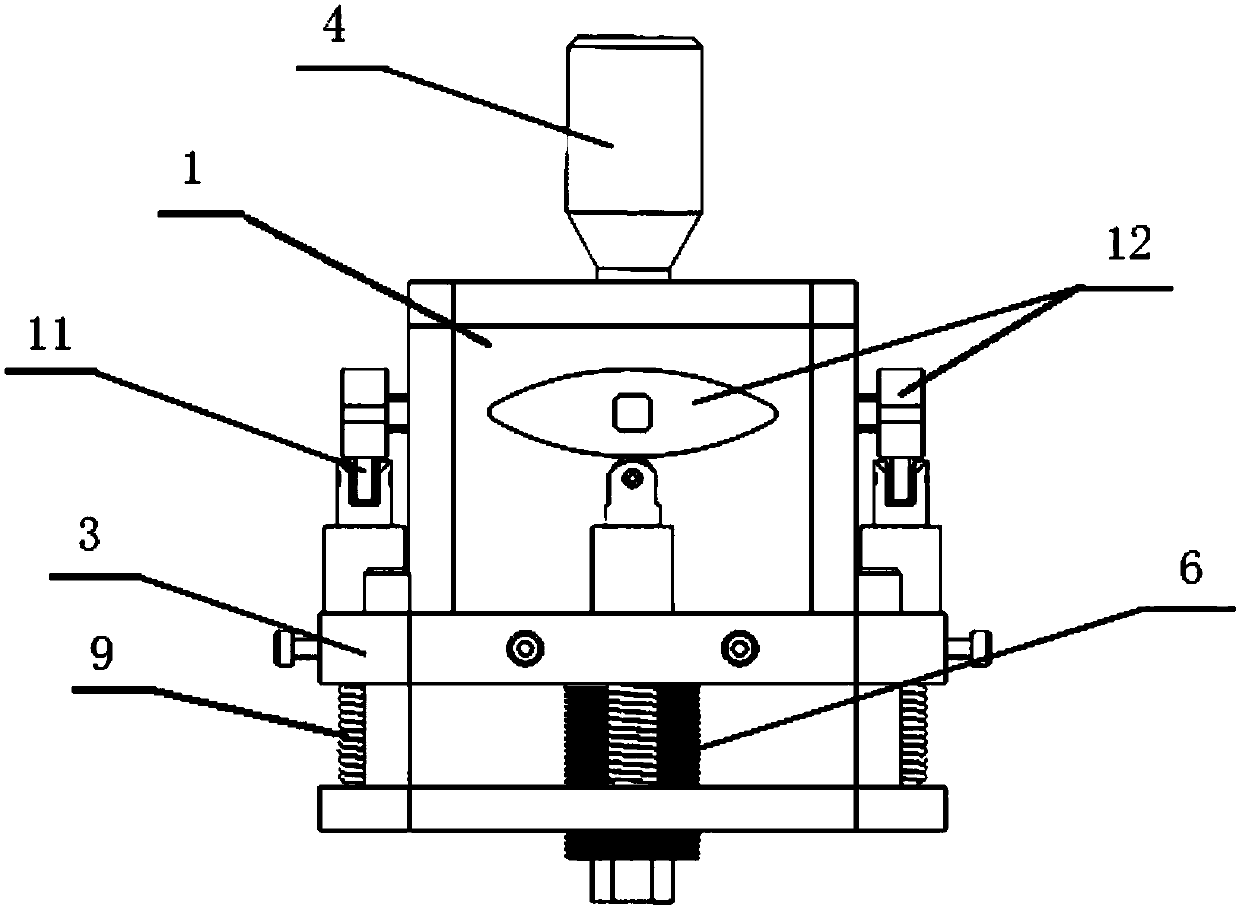
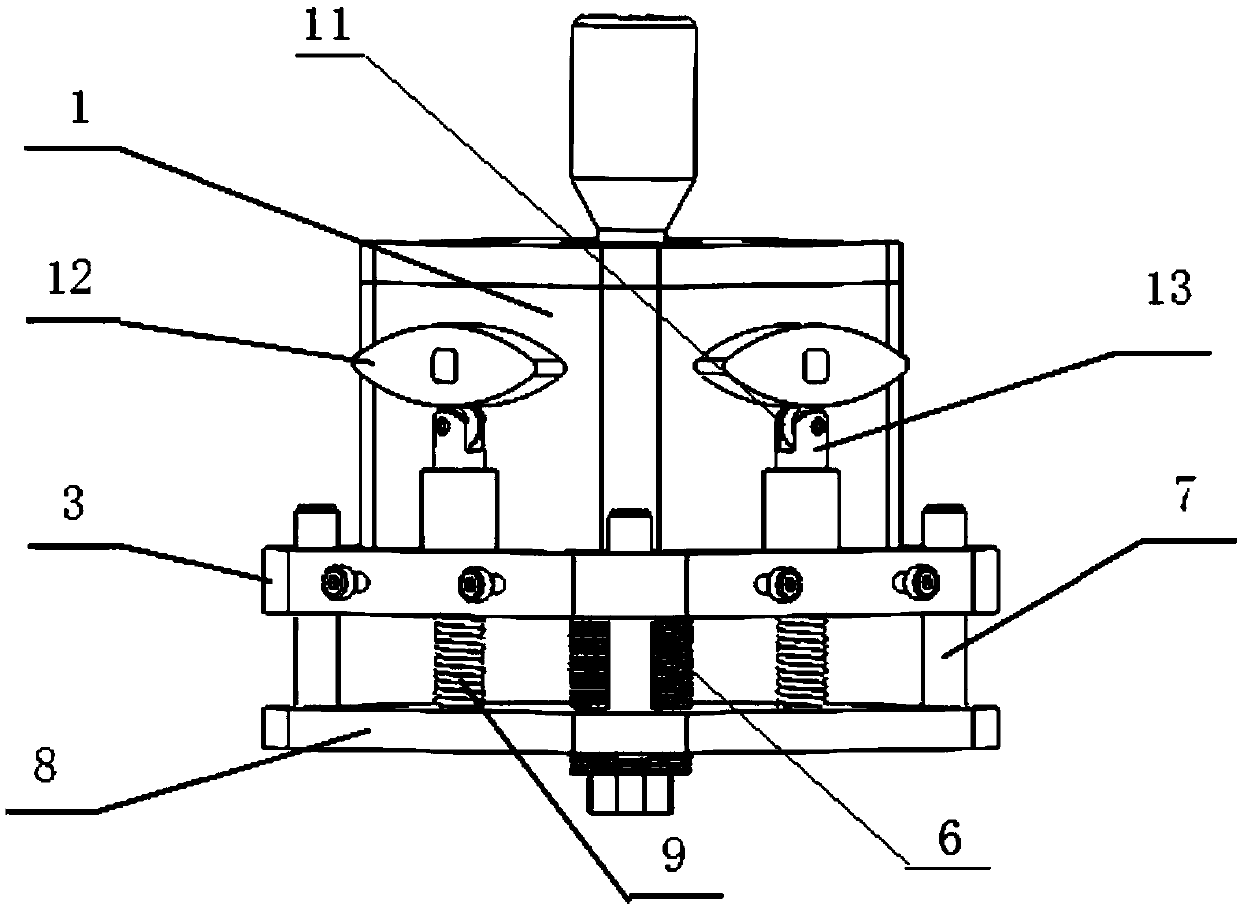
[0027] Such as Figure 1~5 As shown, the present invention includes a ball-and-socket mechanism, a support seat 1, a base 8 and a base driving mechanism, and the ball-and-socket mechanism is located in the support seat 1, as Figure 5 As shown, the ball-and-socket mechanism includes a ball 17, a first stop half-ring 5 and a second stop half-ring 16, and the ball 17 is provided with a power rod 4 and a first rotating shaft 10 whose axes intersect with each other. The second rotating shaft 15, and the power rod 4 is perpendicular to the plane where the first rotating shaft 10 and the second rotating shaft 15 are located. One side of the head end of the power rod 4, and the two ends of the first limiting half ring 5 are respectively installed on the first rotating shaft 10, and the two ends of the second limiting half ring 16 are respectively installed on the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More