

Multi-mobile-robot cooperative transfer control method and system
A technology of mobile robot and control method, applied in control/regulation system, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as difficult to cope with
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
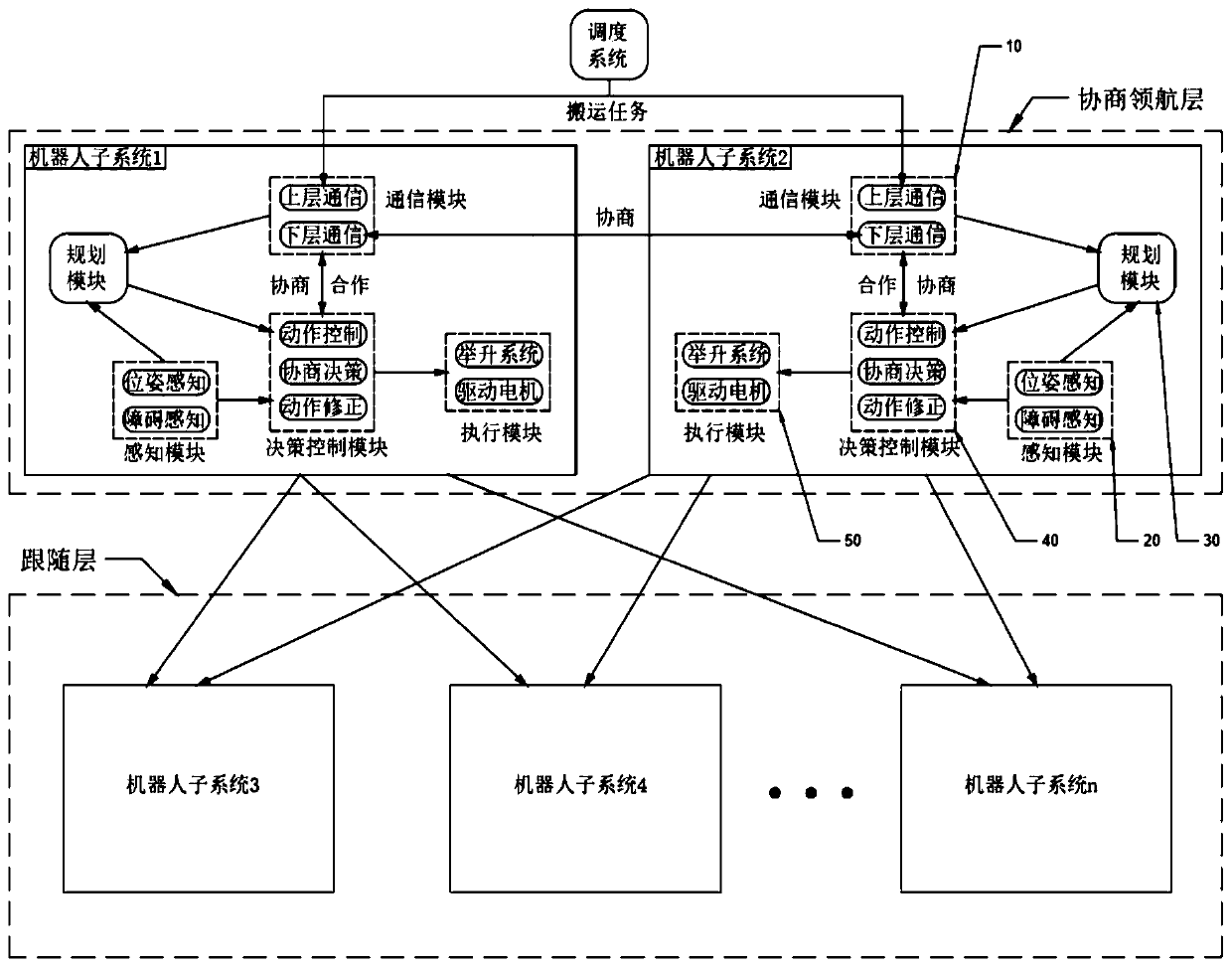
[0061] see Figure 7 , the multi-mobile robot transport cooperative control method provided by the present invention, the control method mainly includes the following steps:
[0062] Step 1: Choose two robot subsystems among multiple robot subsystems to form the negotiation leader layer, and the remaining robot subsystems form the follower layer; the two selected robot subsystems are robot subs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More