

Safe vehicle following distance control system based on vehicle-road cooperation and control method thereof
A technology of following distance and control system, applied in traffic control system of road vehicles, traffic control system, service based on specific environment, etc., can solve problems such as unsafe and effective control, and reduce traffic accident rate and cost. , the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
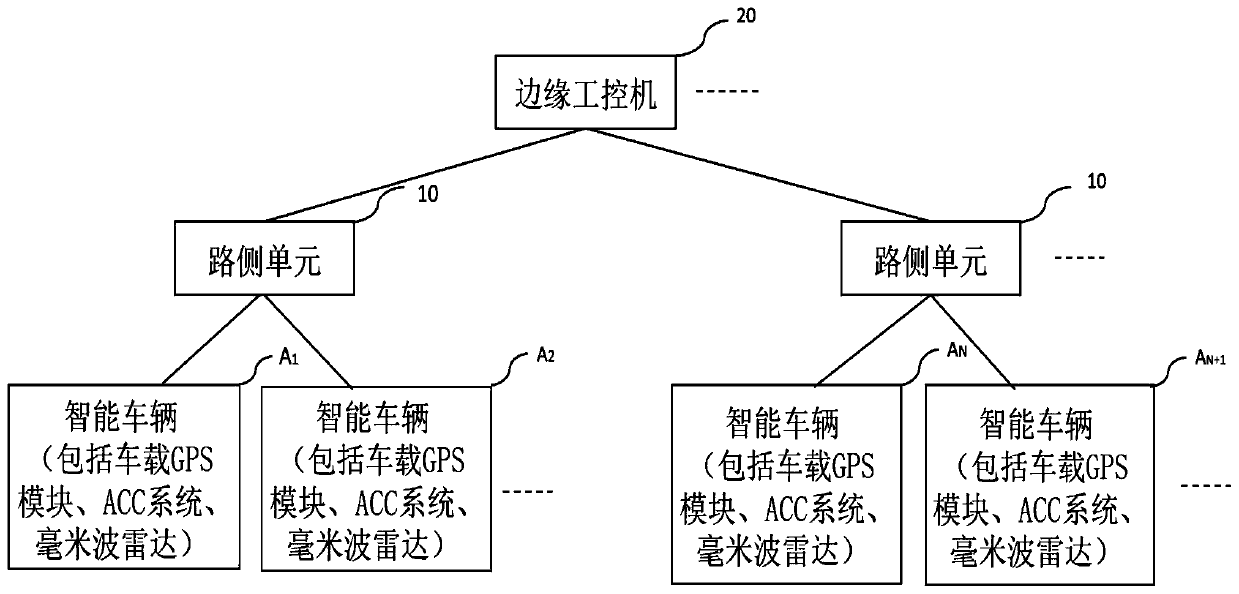
[0058] figure 1 A block diagram of a vehicle-road coordination-based safety distance control system provided for an embodiment of the present invention. like figure 1 As shown, the system includes: intelligent vehicles A1, A2...AN, AN+1 driving on the road, and a roadside unit 10 and an edge industrial computer 20 arranged beside the road, and the intelligent vehicles are all equipped with a vehicle-mounted GPS module , ACC system, speed sensor and vehicle ECU. The speed sensor measures the running speed of the car itself.
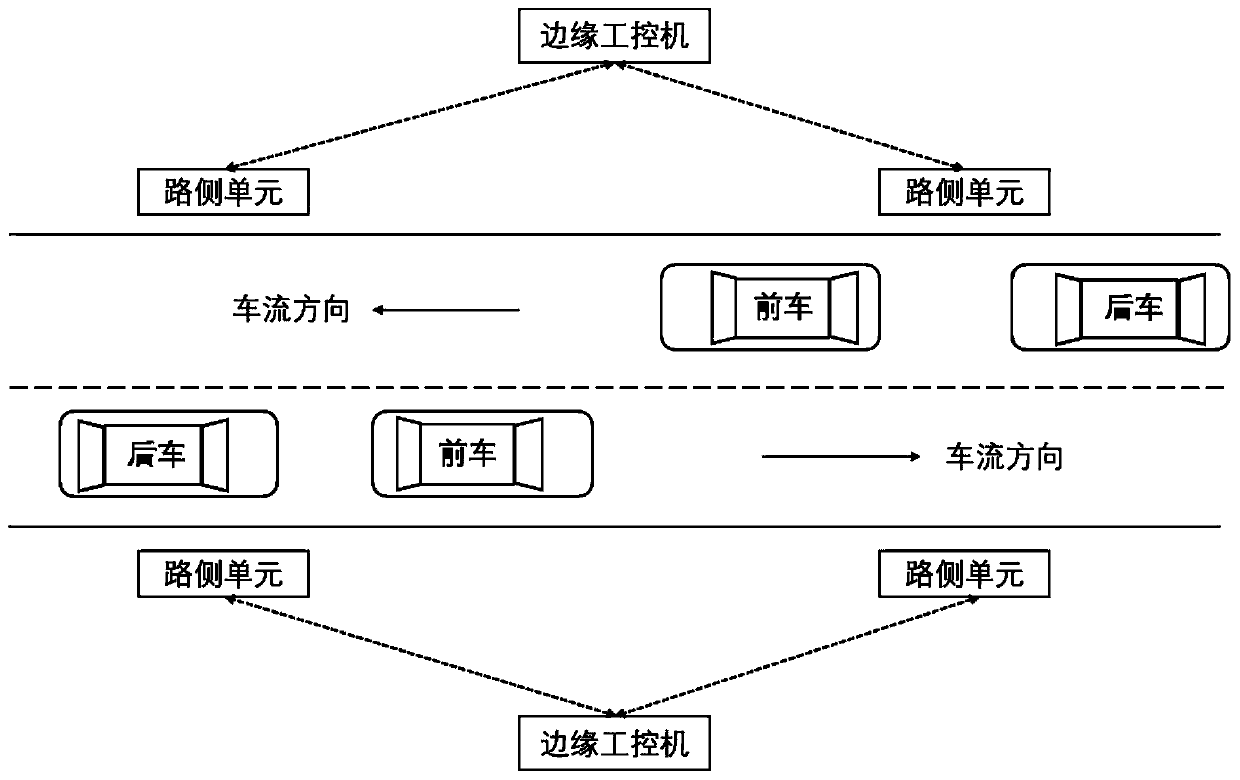
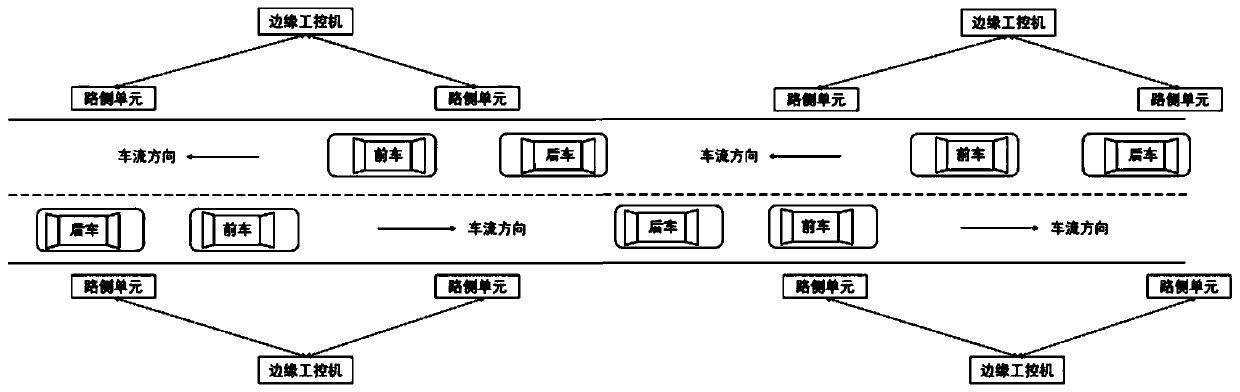
[0059] Take two-way two-lane as an example, see figure 2 and image 3 , On the side of the road, a roadside unit is set every 200 meters, and every two roadside units are connected to an edge industrial computer to monitor the traffic conditions on the road section.
[0060] Wherein, the vehicle-mounted GPS module is used to collect the first speed of the smart vehicle, assuming that the measured first speed of the vehicle in front is 61km / h, and the...
Embodiment 2
[0084] The difference from Embodiment 1 is that every three roadside units are connected to an industrial computer.
[0085] The monitoring range of the roadside unit is affected by the coverage of the communication technology adopted. Taking 5G communication technology as an example, the current coverage of 5G communication technology is determined by factors such as the degree of use, the density and height of nearby buildings, and the quality of the equipment. Decide. The interval between adjacent roadside units is related to vehicle density, road scene and information service quality, etc., and can be determined according to specific conditions.
[0086] In summary, the present invention provides a vehicle-road coordination-based safe following distance control system, wherein the vehicle-mounted GPS module and the speed sensor all collect the first speed and the second speed of the intelligent vehicle in real time; Fusion with the second speed; the millimeter-wave radar ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More