

Soft bionic finger and bionic manipulator
A software and finger technology, applied in the field of bionic machinery, to achieve the effect of strong grip and excellent bionic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
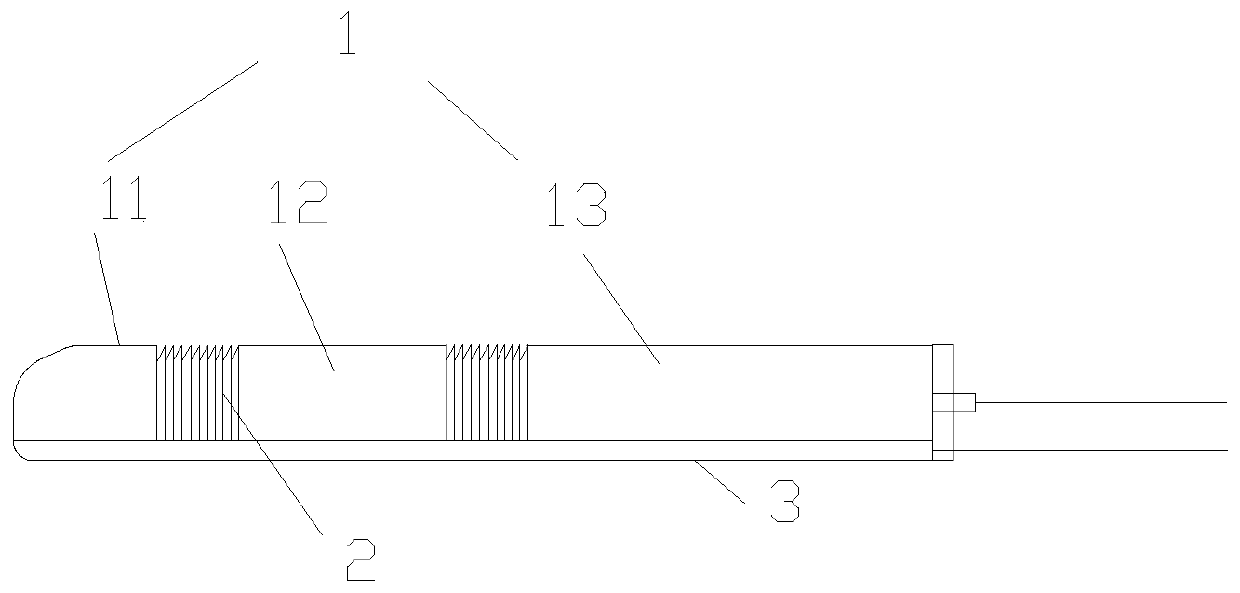
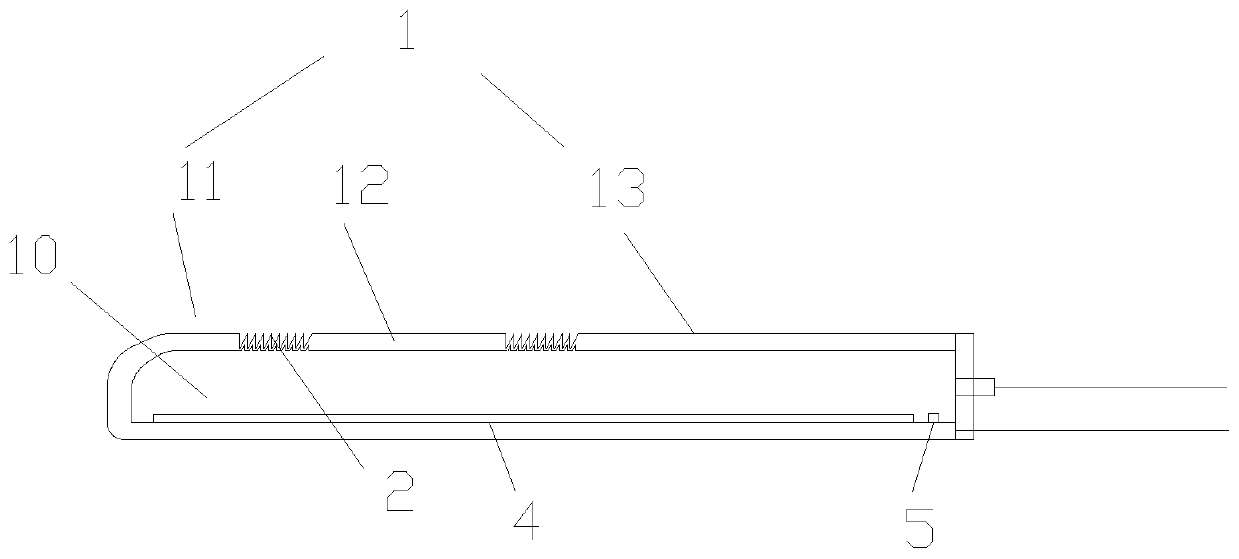
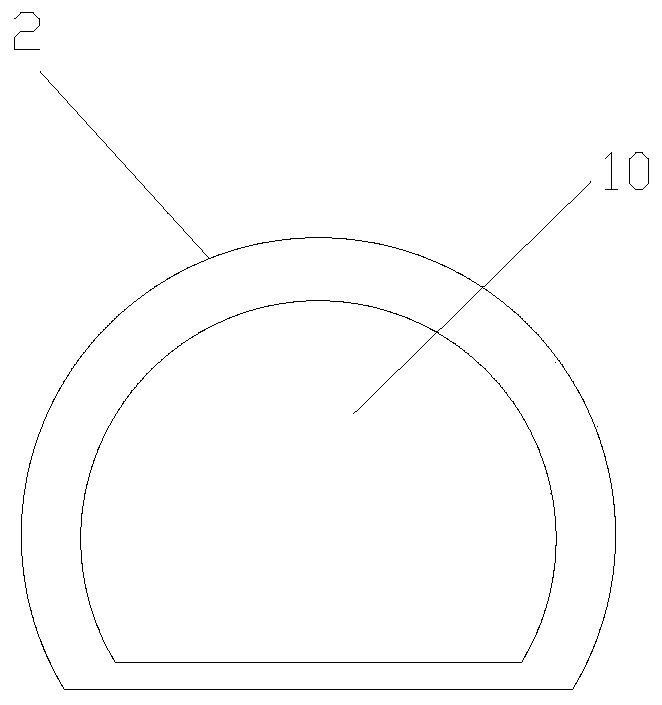
[0024] see Figures 1 to 3 The shown embodiment 1 of the soft bionic finger of the present invention includes: a soft bionic finger, including: at least two knuckles 1 and a telescopic structure 2 for connecting the at least two knuckles 1 . The knuckle 1 is a hollow flexible tube body; the knuckle 1 communicates with the telescopic structure 2 to form a closed air cavity 10, and the telescopic structure 2 includes a linear bottom surface and a wave-shaped structure connecting the linear bottom surface, The wavy structure includes at least one crest and at least one trough, and the crest and trough are connected in sequence.
[0025] The soft bionic finger of the present invention connects the knuckles 1 by setting the telescopic structure 2, and uses the process of inflating and deflating the air cavity 10 in the telescopic structure 2 to generate bending. At the same time, due to the existence of the knuckles 1, a bionic finger similar to a human body is formed. As a result...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More