

A hydraulically driven quadruped bionic robot
A bionic robot and hydraulic power unit technology, applied in the field of bionic robots, can solve problems such as joint parts, affecting the service life of bionic feet, etc., and achieve the effects of control coordination, improving walking performance, and improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
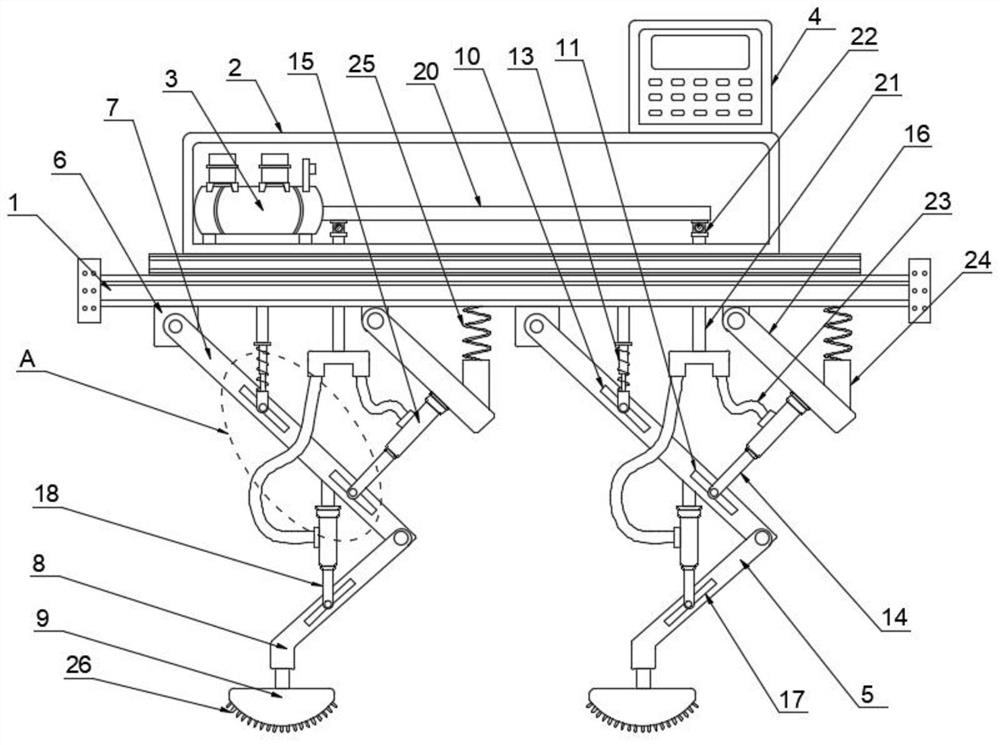
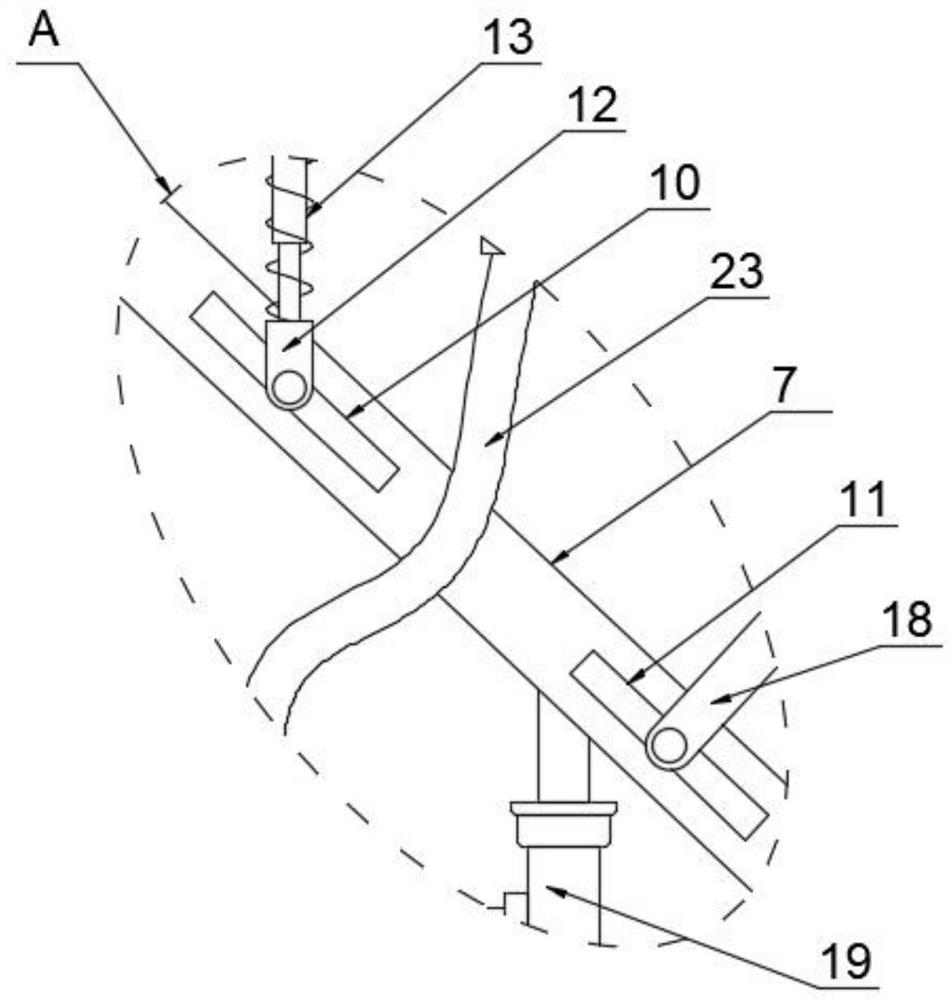
[0020] Such as Figure 1-2 A hydraulically driven quadruped bionic robot shown includes a body support 1, a drive box 2 arranged on the body support 1, a hydraulic power unit 3 arranged inside the drive box 2, and a console arranged on the top of the drive box 2 4. Four bionic foot mechanisms 5 are arranged at the bottom of the body support 1, and the bionic foot mechanisms 5 include a fixed block 6 fixed on the bottom of the body support 1, a thigh connection...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More