Wire-driven continuous bionic robotic dolphin
A continuous, line-driven technology, applied to non-rotating propulsion elements, rudder steering, underwater operating equipment, etc., to achieve the effect of simple structure, efficient swimming, and easy realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
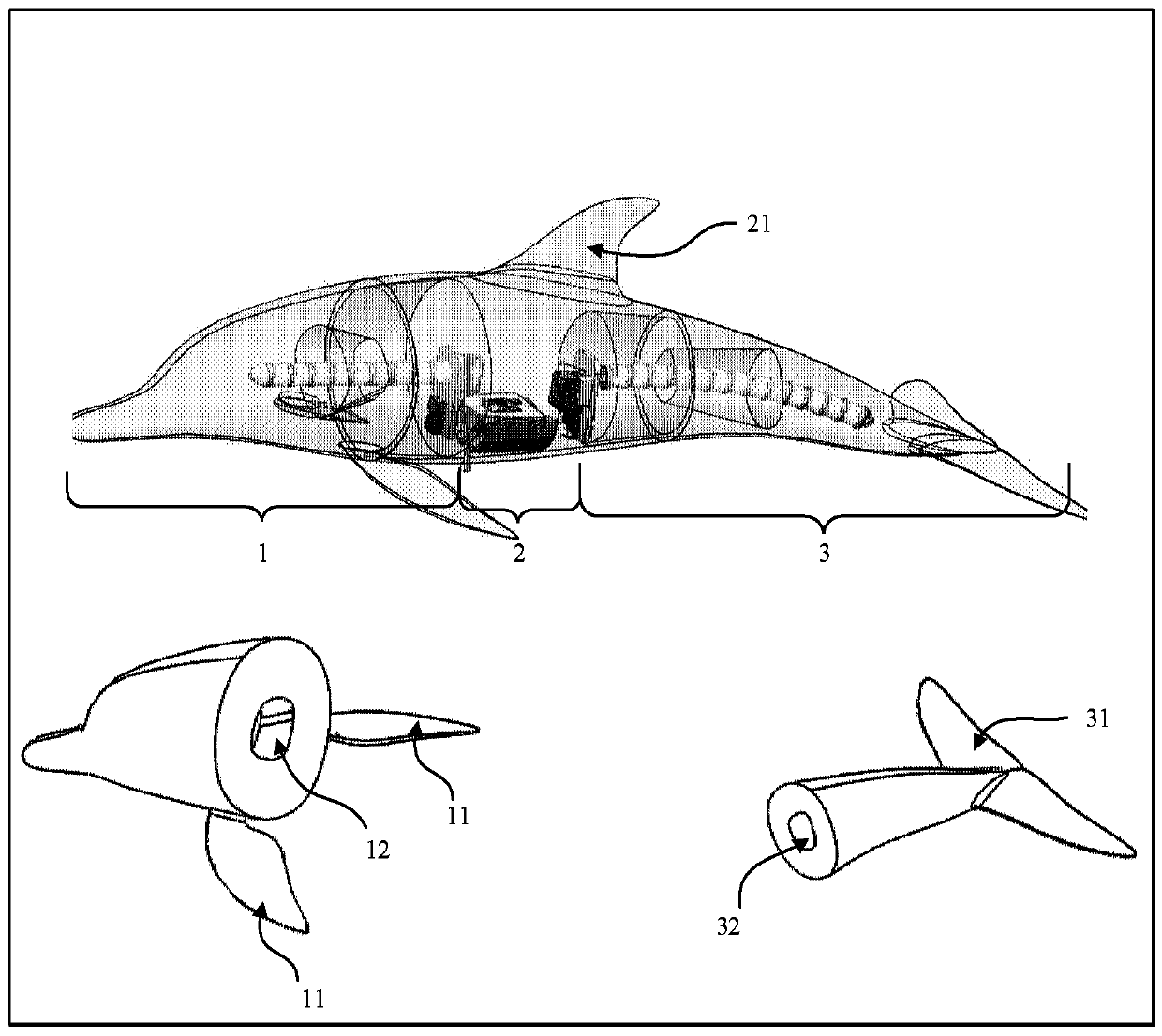
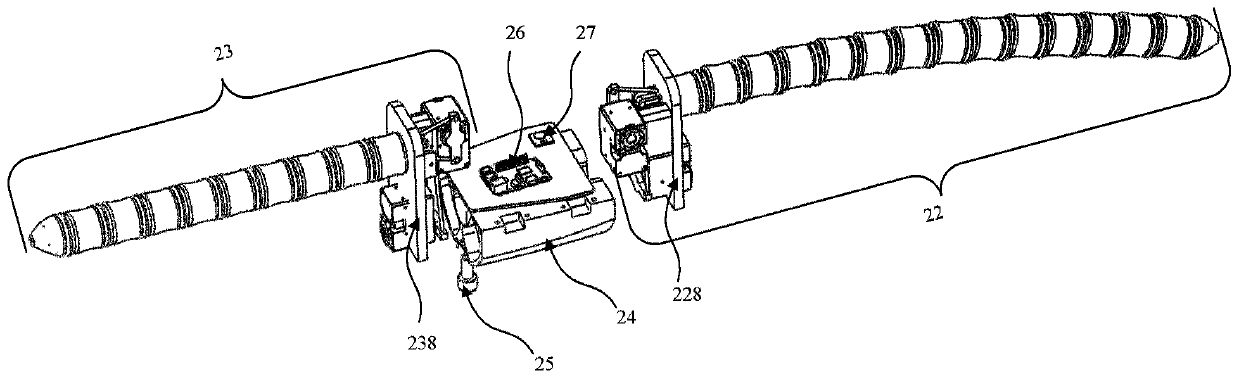
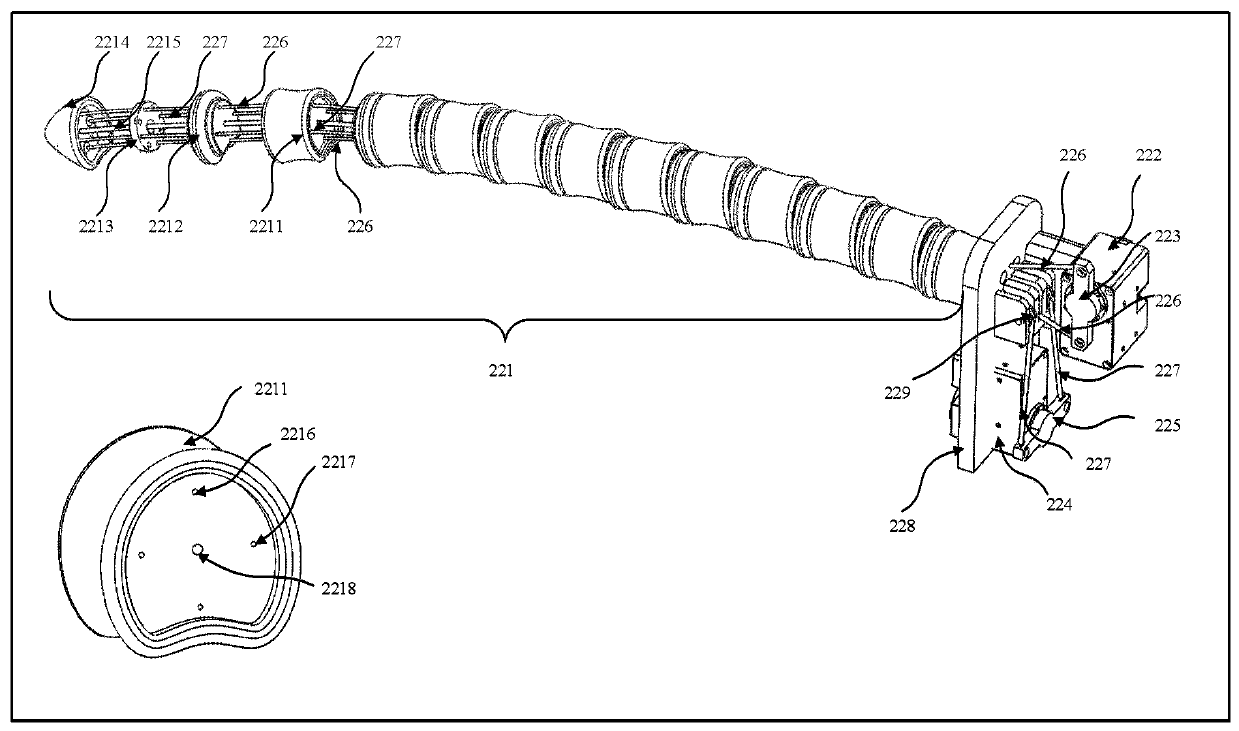
[0048] The invention provides a line-driven continuous bionic robot dolphin, comprising: a head, an abdomen and a tail, a drive module and a steering module are installed in the abdomen, and the drive module and the steering module respectively include a spine, a steering gear, Steering disc and transmission line; the rotation of the steering gear of the driving module and the steering module drives the deflection of the steering disc, and the deflection of the steering disc drives the action of the transmission line, and the action of the transmission line drives the spine to move up and down, left and right, and then realizes the line Drive the three-dimensional movement of the continuous bionic robot dolphin.
[0049] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com