

A vertical take-off and landing unmanned aerial vehicle and its control method
A technology of vertical take-off and landing of unmanned aerial vehicles, applied in the field of aviation aircraft, which can solve the problems of increasing the internal space of the aircraft, the difficulty of controlling the unmanned aircraft, and the small load, so as to reduce the area of the flying field, eliminate the dihedral reflection effect, The effect of reducing self-weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
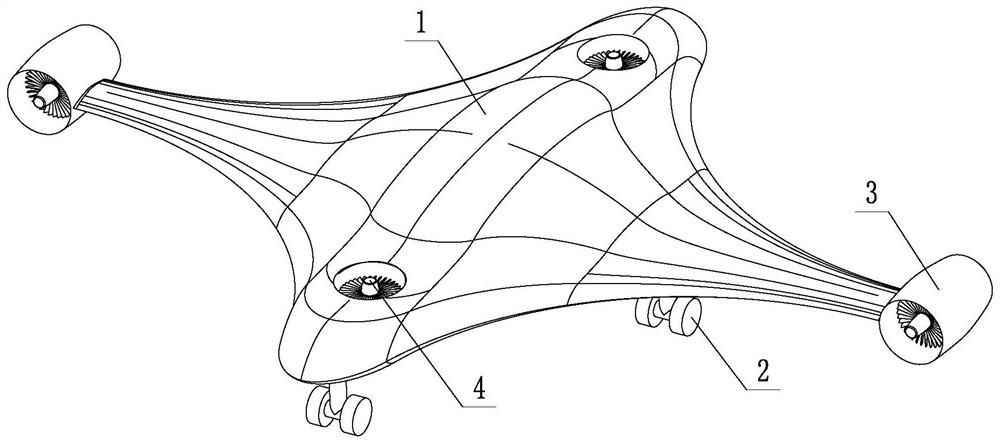
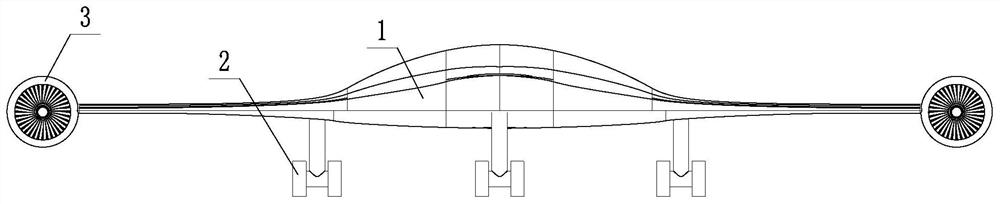
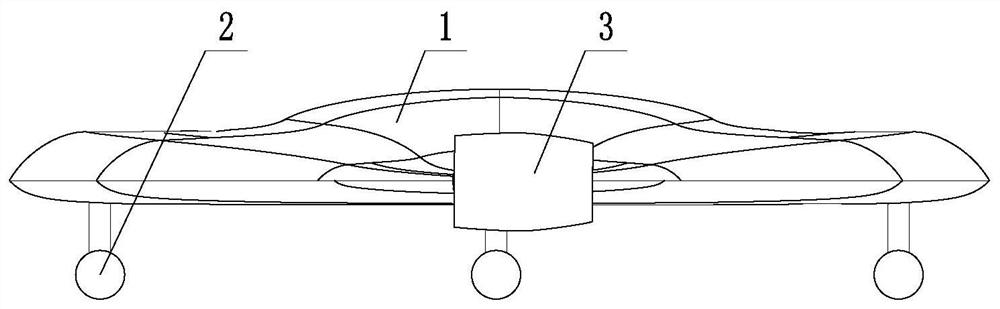
[0028] Such as Figure 1~4 As shown, a vertical take-off and landing UAV includes a wing-body fusion fuselage 1, a power system and a landing gear 2; structure, and the lateral wingspan of the wing-body fusion fuselage 1 is greater than the total longitudinal length; the power system includes a turbofan engine 3 and a lift fan engine 4; the number of the turbofan engines 3 is two, and the two turbofan engines 3 Symmetrically connected to the left and right sides of the wing-body fusion fuselage 1, the turbofan engine 3 is connected to the wing-body fusion fuselage 1 through a tilting transmission mechanism, and the turbofan engine 3 can perform 360° tilting and attitude adjustment by means of the tilting transmission mechanism When the turbofan engine 3 is tilting and adjusting the attitude, the thrust directions of the left and righ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More