

Self-adaptive follow-up traction mechanism for mooring cable of mooring unmanned aerial vehicle
A pulling mechanism and self-adaptive technology, which is applied in the field of pulling mechanism and tethered UAV traction mechanism, can solve problems that affect the service life of the UAV, damage related parts of the body, consume more energy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in detail below with reference to the accompanying drawings and examples.
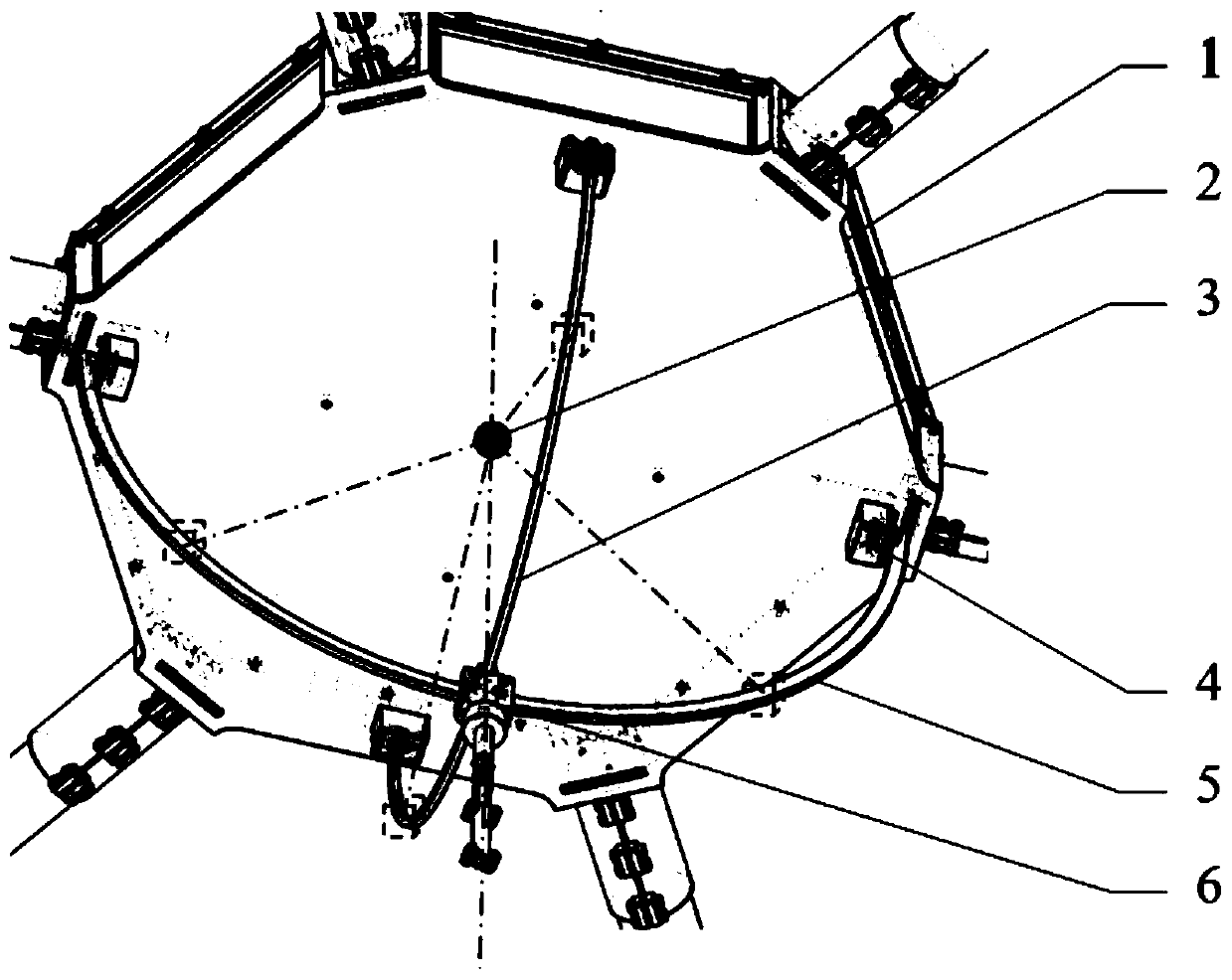
[0021] This embodiment provides an adaptive follow-up pulling mechanism for the mooring cable of a tethered UAV, which can automatically adjust the position of the connection point of the mooring cable according to the flight state of the tethering UAV, so that The extension line always passes through the center of gravity of the tethered drone, thereby eradicating the influence of eccentric moments.
[0022] The basic principle of the pulling mechanism is to change the fixed connection of the traditional mooring cable of the tethered UAV to an adaptive follow-up connection, so that the tethered cable extension line passing through the connection point always passes through the center of gravity of the UAV.
[0023] like figure 1 As shown, the mooring cable self-adaptive follow-up pulling mechanism includes: a guide pull ring 3, a load-bearing pull ring 5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More