

A Method of Extracting Leg Dynamic Eigenvalues Based on Pedestrian Foot Force
A technology of plantar force and eigenvalues, applied in complex mathematical operations, instruments, design optimization/simulation, etc., to improve efficiency, reduce time and steps, and solve high costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The technical solution of the present invention will be further introduced below in conjunction with the accompanying drawings and specific implementation methods.
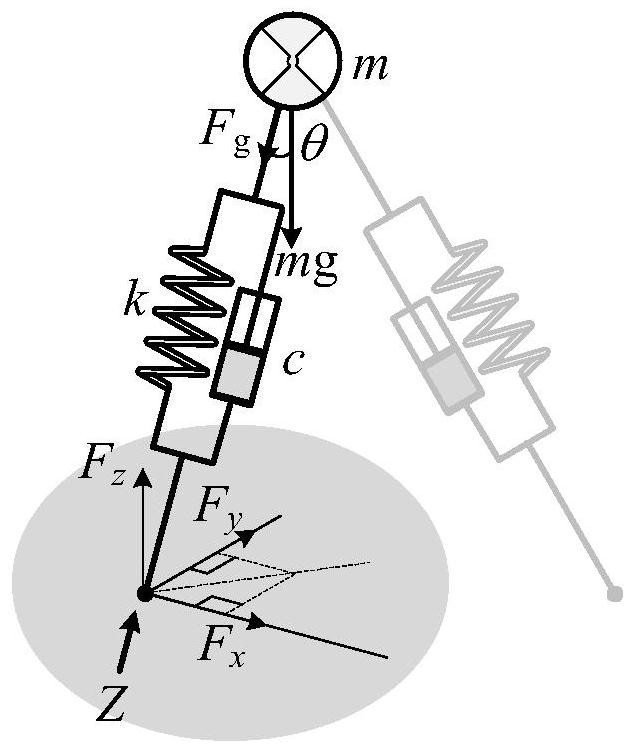
[0041] Such as figure 1 Shown is a simplified model of the dynamics of the leg structure during walking, where m, k, and c are human body mass, leg stiffness, and damping, respectively; g is the acceleration of gravity, θ is the angle between the human leg and the direction of gravity, u are the axial acceleration, velocity and displacement of the leg, respectively. Plantar F x , F y , F z They are the support component forces in the x-longitudinal, y-lateral and z-vertical directions respectively. The component forces can be obtained by direct testing on the force platform. The magnitude is shown in formula (1), assuming that it acts along the axis of the leg.
[0042]
[0043] according to figure 1 The force relationship shown yields the cosine of θ as:
[0044]
[0045] According to the axi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More