

Method for constructing indoor two-dimensional semantic grid map with object navigation point
A grid map and construction method technology, applied in navigation, surveying and navigation, navigation computing tools, etc., can solve the problems that robots cannot truly understand the environment, cannot complete high-level complex tasks, etc., and achieve fast particle convergence and planning efficiency High, stable effect of repositioning process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
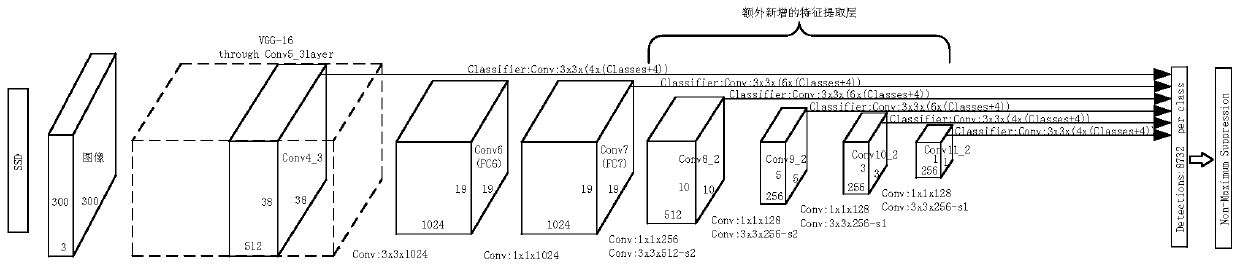
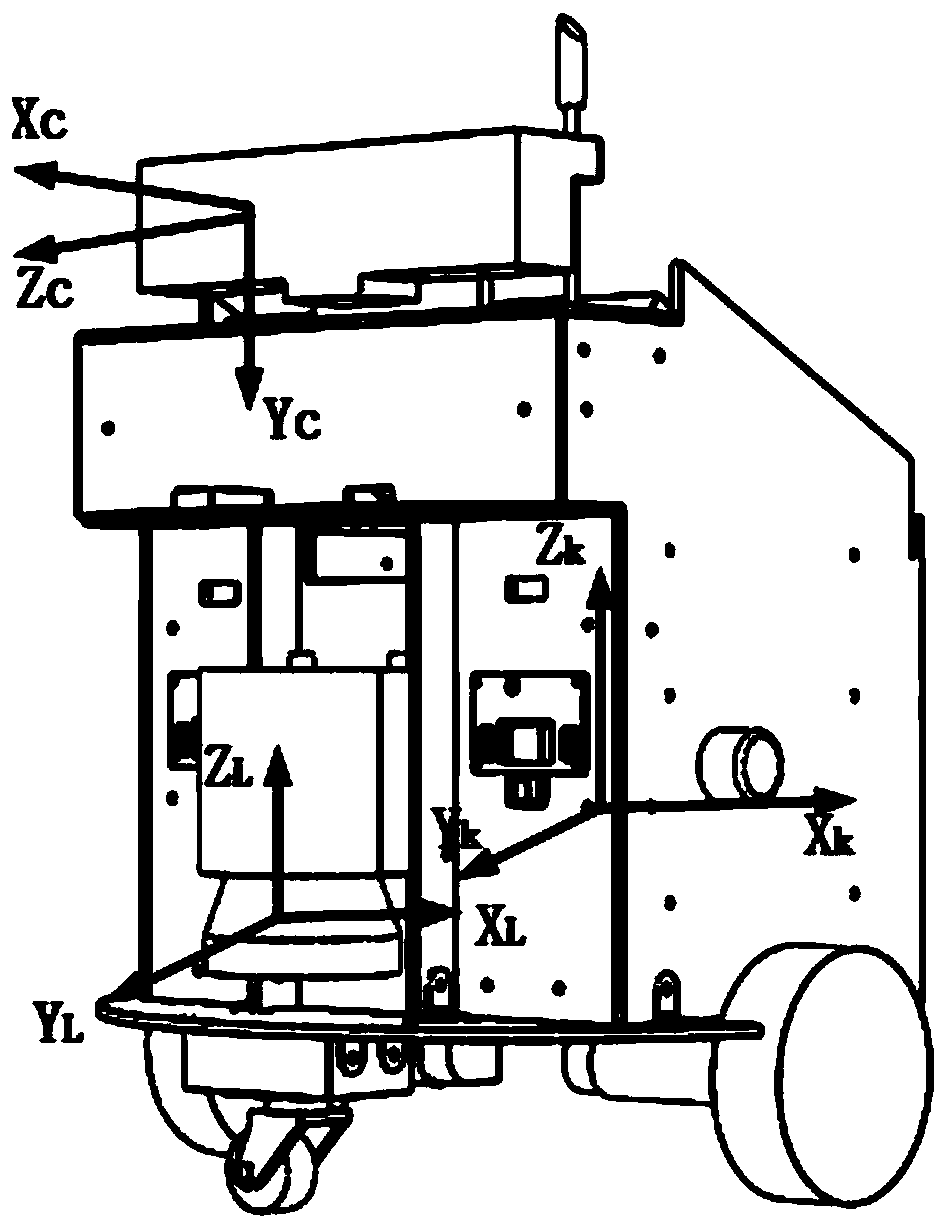
[0058] The technical solutions of the present invention will be further specifically described below through the embodiments and in conjunction with the accompanying drawings, a method for constructing an indoor two-dimensional semantic grid map with object navigation points. The color image and depth image data obtained by Kinect v2, input the color image into the SSD detection and recognition method, obtain the object detection frame and category in the image, and use the registration data to calculate the corresponding position of the object in the color image in the depth image , convert the acquired Kinect v2 depth data into imitation laser data, and convert the imitation laser data with semantic information under the camera to the global map coordinate system, and update each grid cell in the semantic grid map through Bayesian estimation the category status, and finally complete the creation of the semantic grid map. After the map is created, the navigation points are ex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More