

A scalable robot torso and bionic quadruped robot
A quadruped robot and robot technology, applied in the field of robotics, can solve problems such as inability to produce scaling and deformation, and achieve the effect of improving obstacle surmounting ability and movement ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
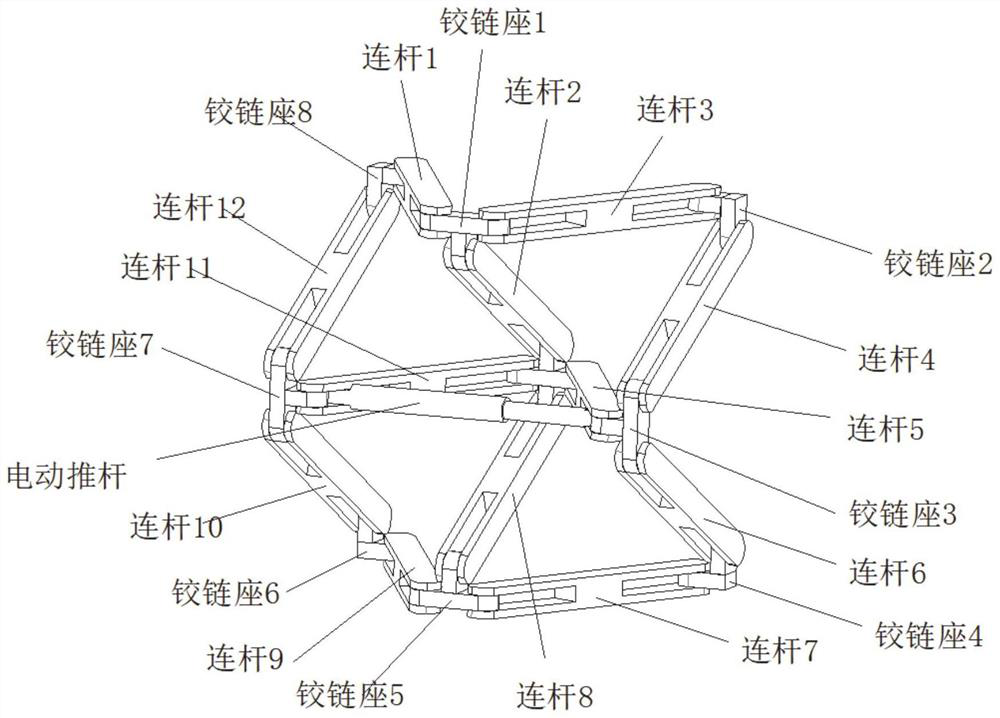
[0026] This embodiment provides a scalable robot torso, including: a trunk link and an annular metamorphic mechanism; the trunk link connects two structurally symmetrical annular metamorphic mechanisms;
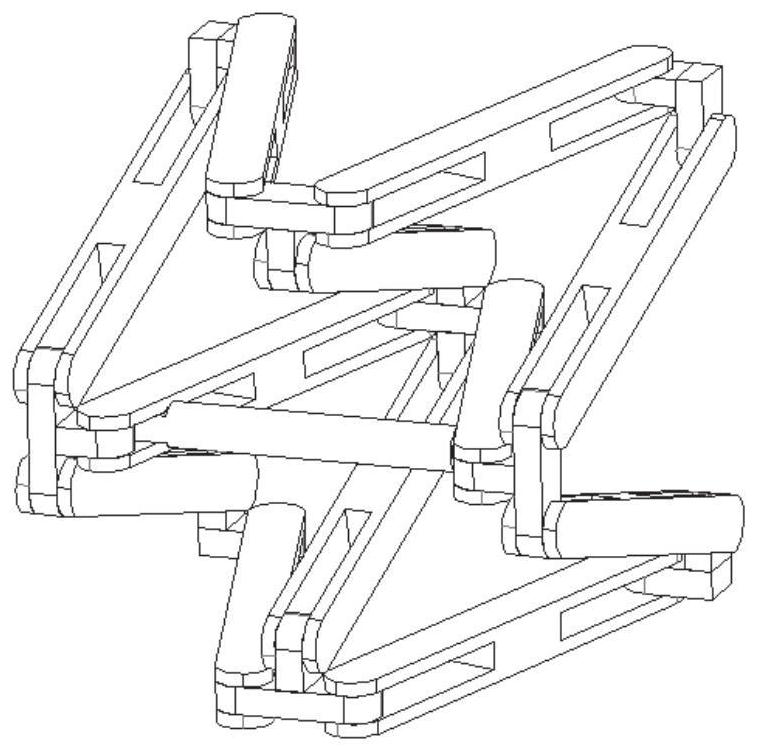
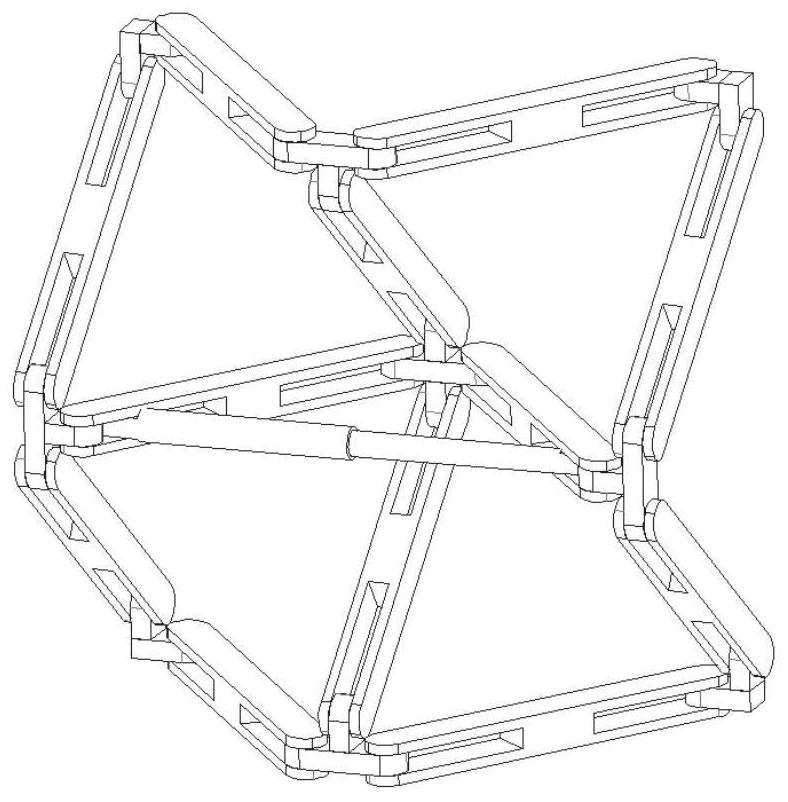
[0027] Such as figure 1 As shown, the ring metamorphic mechanism is composed of several first connecting rods that are movably connected head-to-tail through the first connecting piece, and the second connecting rod is connected at the joint of every two first connecting rods, and each first connecting rod Only one end is connected with the second connecting rod, and the second connecting rods are flexibly connected through the second connecting piece; the telescopic rod is connected between the two second connecting rods of the annular metamorphic mechanism at the center symmetrical position.
[0028] Specifically, the principle of metamorphic mechanism is to use a specific method to change the topological structure of the mechanism so as to realize the change of the degree ...
Embodiment 2
[0049] This embodiment provides a bionic quadruped robot, comprising: the scalable robot torso and leg mechanism described in Embodiment 1; the leg mechanism is connected to the first link.
[0050] This embodiment proposes a quadruped robot, the leg mechanism includes a left front leg 4, a left rear leg 6, a right front leg 5 and a right rear leg 7, and the leg structures are consistent.
[0051] Such as Figure 4 As shown, taking a leg as an example, the leg mechanism includes a leg base 8, a hip joint base 9, a calf 10, a thigh 11 and a rubber ball 12; wherein, the leg base 8 is connected to the ring metamorphic mechanism, Connected to the first connecting rod, respectively connected to the hinge base 3 and the hinge base 7, the two leg bases are symmetrically arranged; the hip joint base 9 is movably connected to the leg base 8, and the thigh 11 is connected to the hip joint base 9 The shank 10 is movably connected to the thigh 11, and the lower end of the shank 10 is conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More