

Unmanned ship path tracking control method based on combination of improved LOS guidance law and fuzzy PID
A technology of path tracking and control methods, applied in controllers with specific characteristics, two-dimensional position/course control, vehicle position/route/altitude control, etc., can solve problems such as low engineering practicability and complex controller design , to achieve the effect of improving path tracking accuracy, improving rapidity and stability, and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
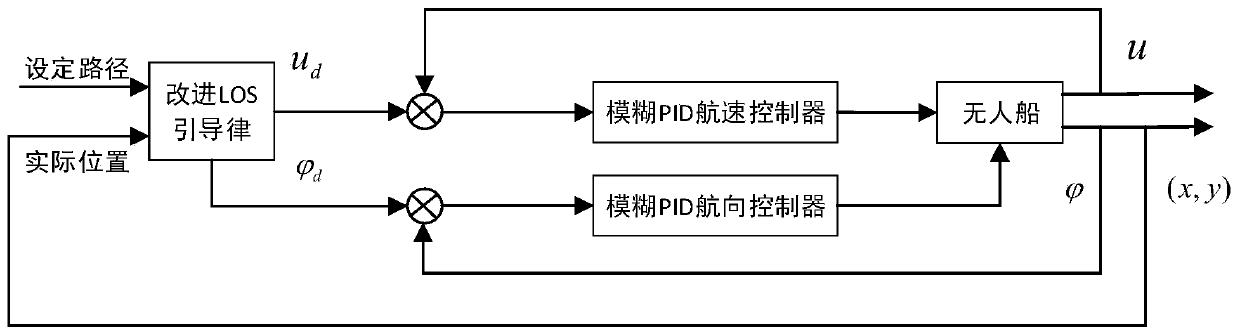
[0016] The invention discloses an unmanned ship path tracking control method combined with improved LOS guidance law and fuzzy PID, belonging to the field of unmanned ship motion control. The invention realizes the path tracking control of the unmanned ship by improving the LOS guidance law and designing the fuzzy PID controller. This method effectively reduces the influence of the speed on the path tracking control of the unmanned ship, improves the speed and accuracy of the path tracking of the unmanned ship, and lays the foundation for the autonomous and intelligent development of the unmanned ship.
[0017] In the following, by introducing the specific implementation steps of the present invention, a further detailed description will be made in conjunction with the accompanying drawings. According to the following description, the content, features, advantages and effects of the present invention will become clearer.
[0018] figure 1 It is the overall control principle b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More