

Robot Adaptive Impedance Control Method Based on Biologically Inspired Neural Network
A neural network and impedance control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as the inability to realize real-time precise impedance control of robots, improve adaptive estimation ability, high control accuracy, and ensure global convergence. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain related inventions, not to limit the invention. It should also be noted that, for the convenience of description, only the parts related to the related invention are shown in the drawings.
[0051] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present application will be described in detail below with reference to the accompanying drawings and embodiments.
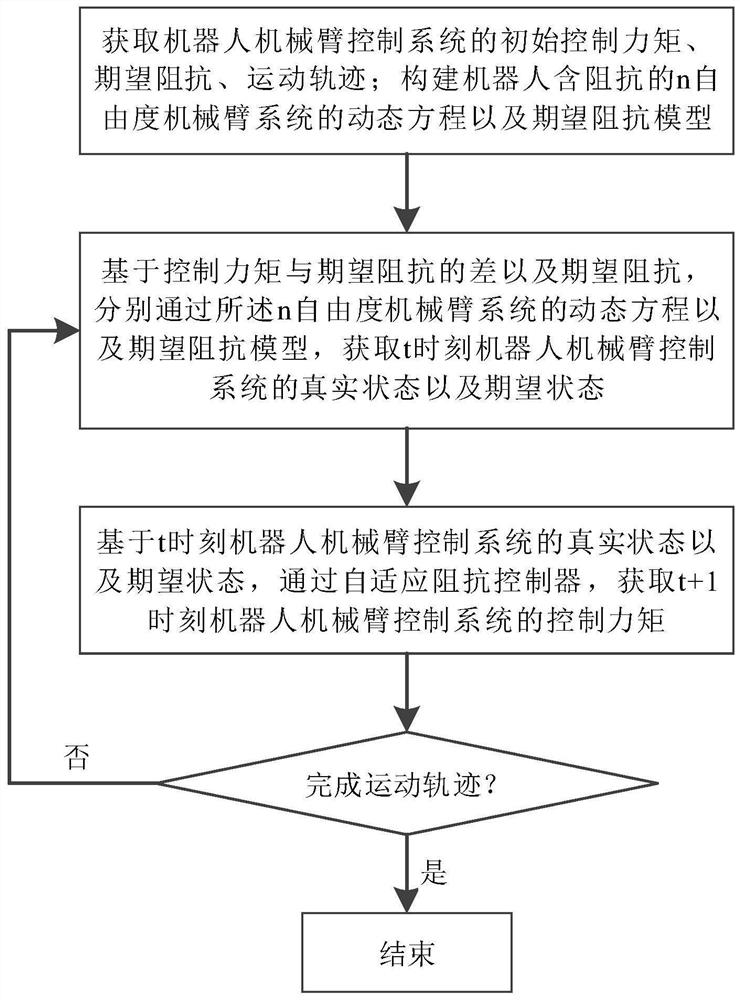
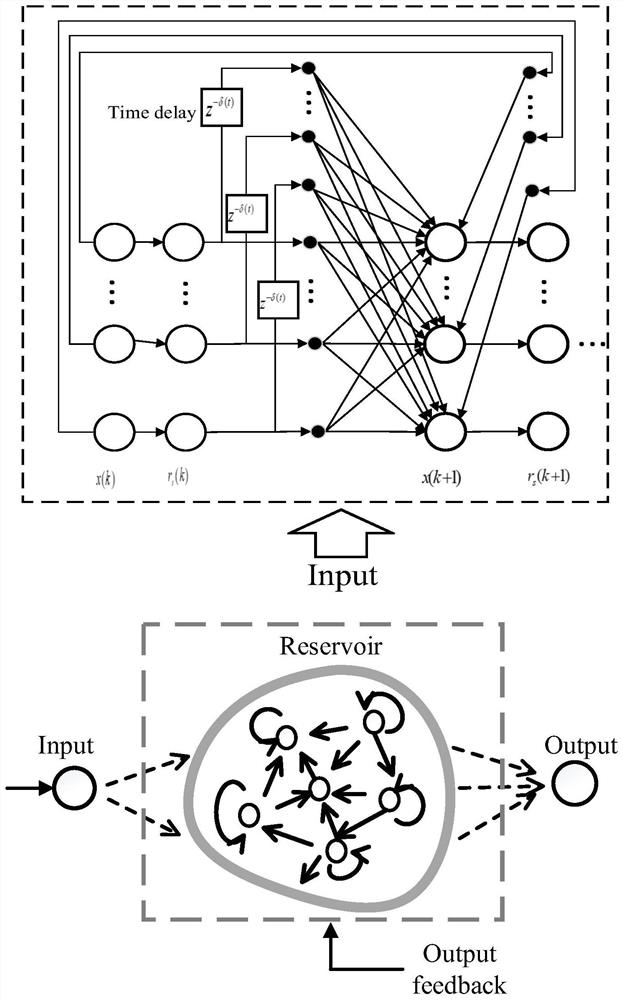
[0052] The present invention provides a kind of robot self-adaptive impedance control method based on biological heuristic neural network, this method designs a kind of self-adaptive impedance control based on biological heuristic network, combines full state feedback and network unk...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More