

Parallel path planning method for automatic guided vehicles in warehouse sorting
An automatic guided vehicle and path planning technology, applied in the field of logistics, can solve the problems of small planning solution space for automatic guided vehicles, unfavorable automatic guided vehicle scheduling, lack of planning research, etc., to achieve short running distance and strengthen automatic guided vehicle workshop coordination , run flexible effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to better understand the technical content of the present invention, the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
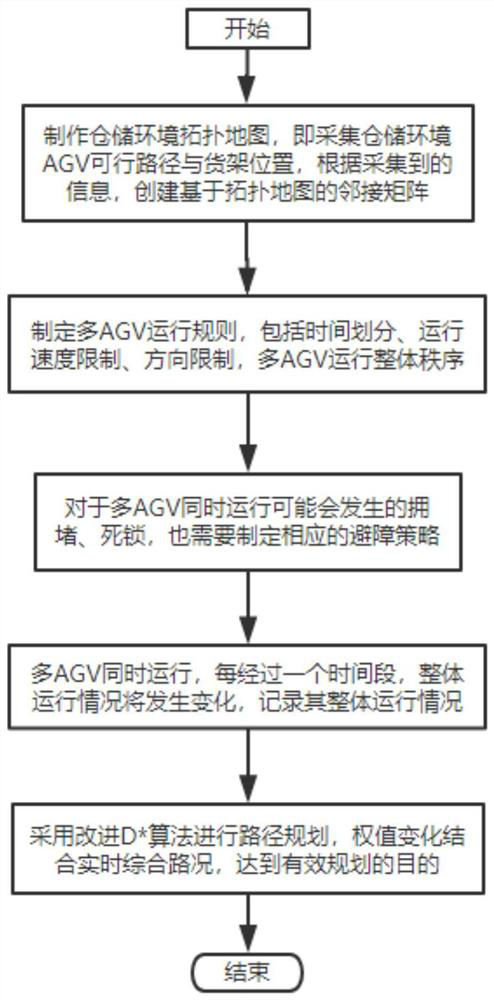
[0026] refer to figure 1 , the implementation steps of the present invention are as follows:
[0027] Step 1. Make a topological map of the storage environment and create an adjacency matrix of the topological map.
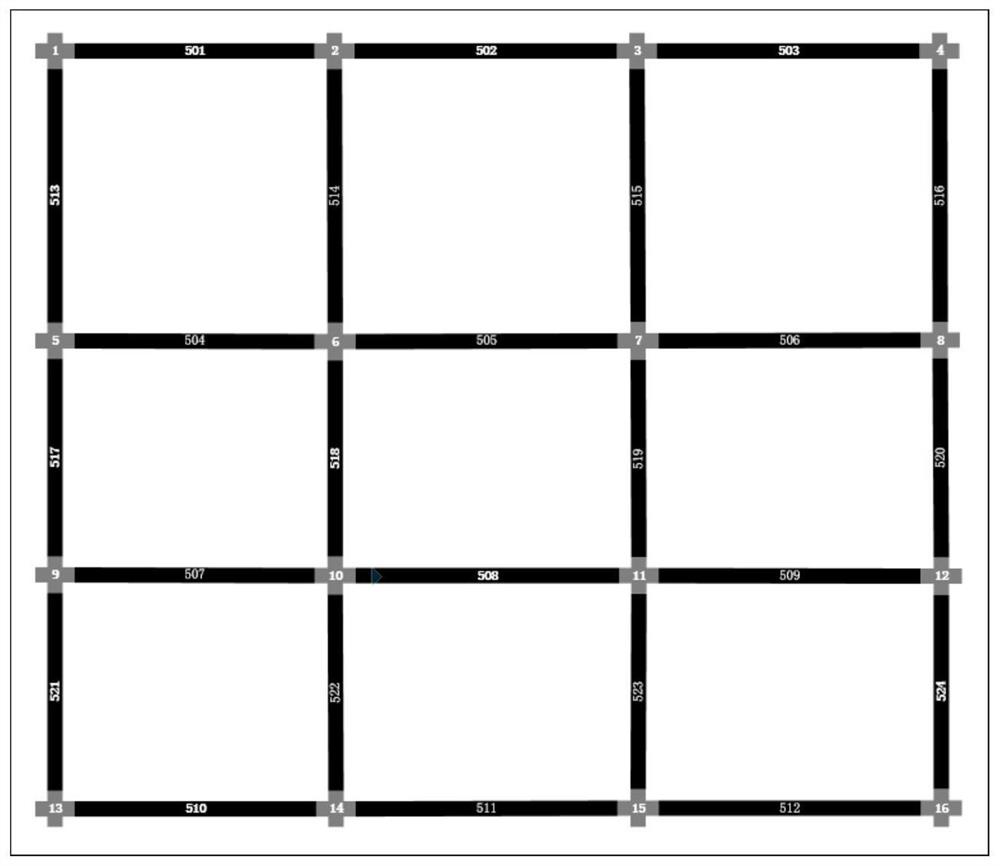
[0028] This step focuses on collecting the relative position of the feasible path of the automatic guided vehicle in the storage environment and the shelf. According to the collected information, set the nodes that the unmanned vehicle can reach, and create an adjacency matrix based on the topology map according to the node information. The realization is as follows:
[0029] 1.1) Collect environmental map information, use the turning point of each intersection in the environmental map and the point where the unmanned vehicle needs to stop as a topological n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More