

Unpowered pipeline inspection robot with controllable speed
A technology of power pipelines and robots, which is applied to special pipes, pipe components, mechanical equipment, etc., can solve the problems that robots cannot actively control the speed, and achieve the effects of enhancing the ability of active speed control and battery life, saving costs, and increasing the detection area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
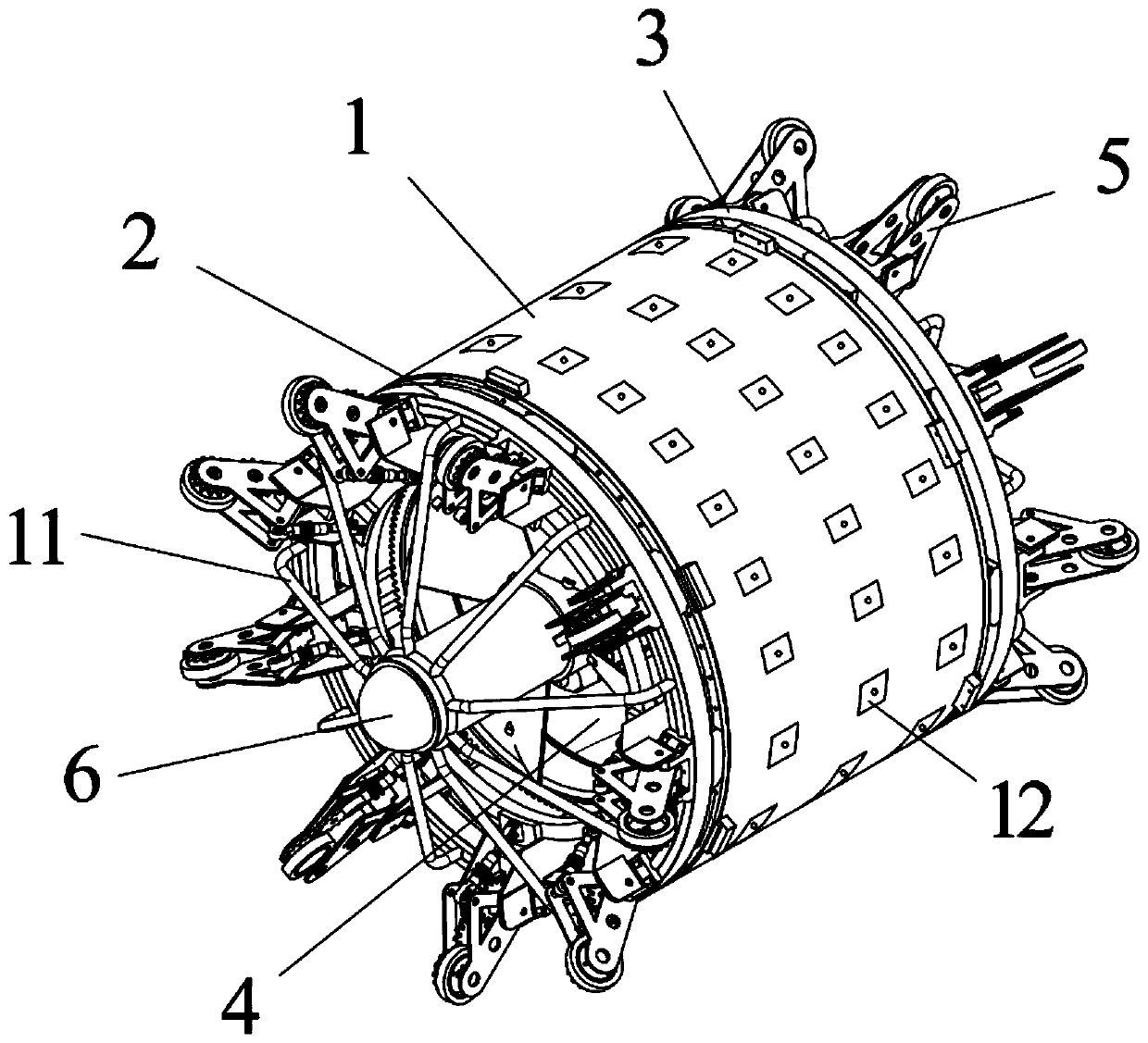
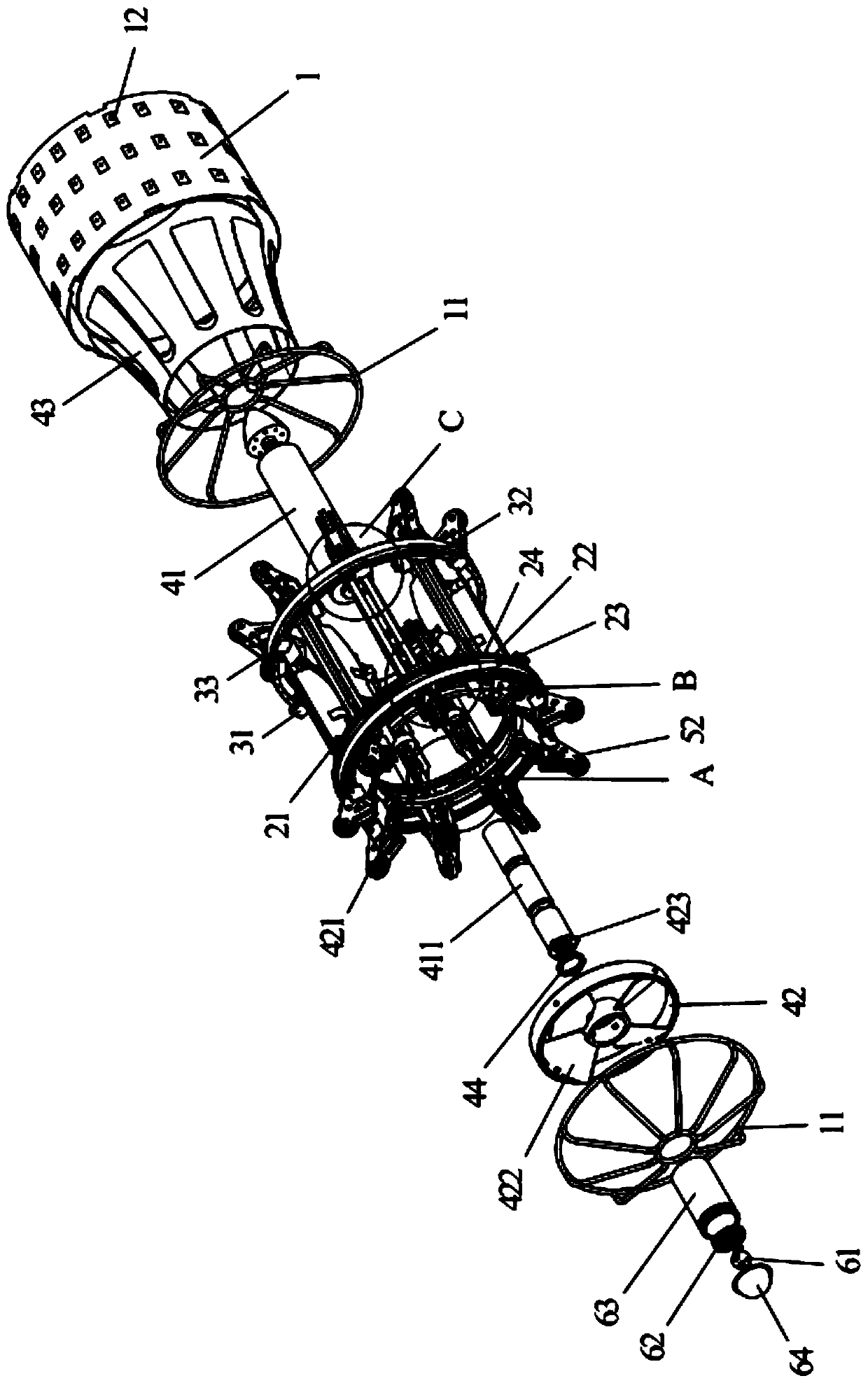
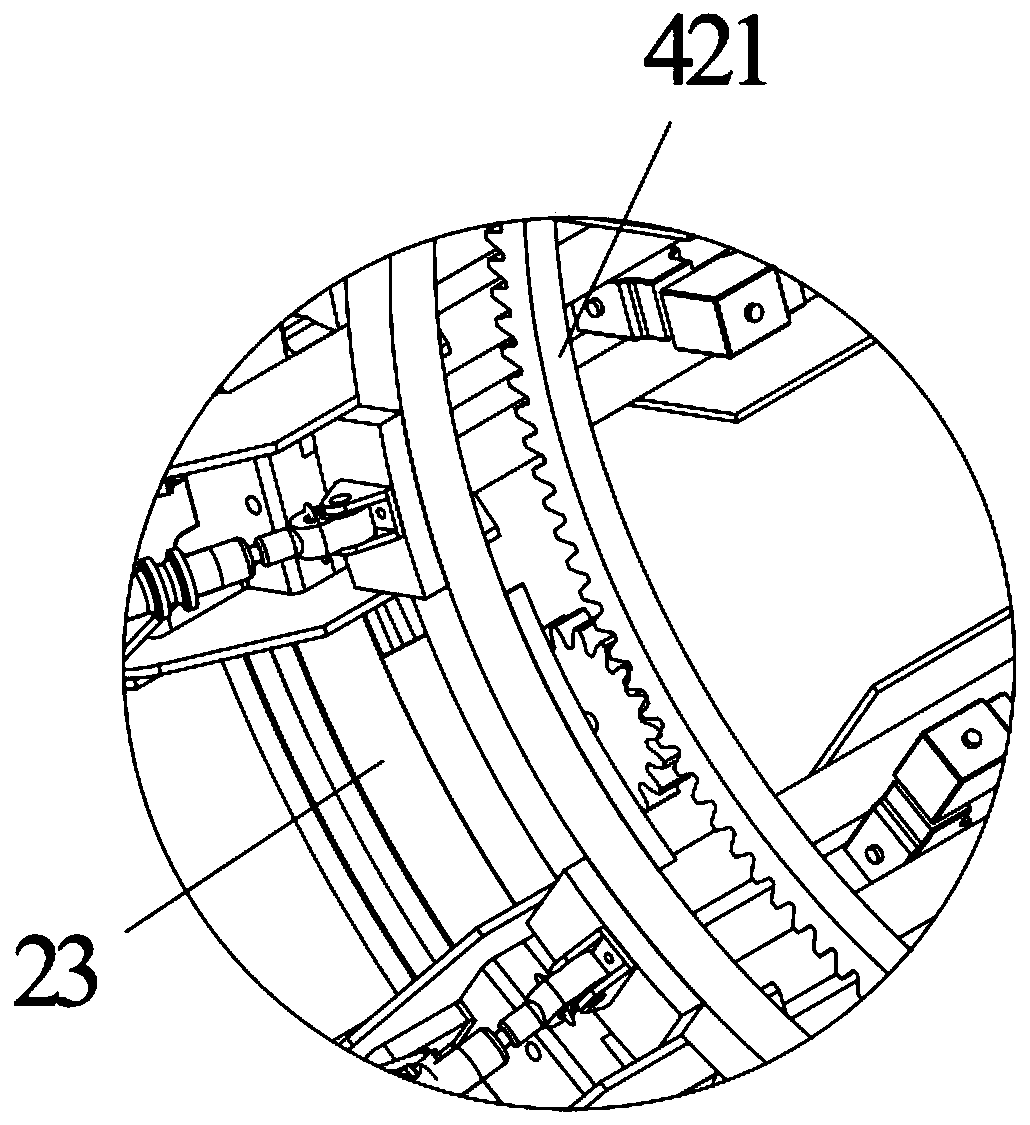
[0037] Such as Figure 1~6 As shown, a speed-controllable unpowered pipeline inspection robot includes a housing 1 and a first rotating device 2, a second rotating device 3 and a driving device 4 arranged inside the housing 1, the first rotating device 2 and the second rotating device The two rotating devices 3 are respectively arranged at both ends of the housing 1, the first rotating device 2 is meshed with the driving device 4, and the driving device 4 drives the first rotating device 2 to make the housing 1 rotate axially, the first rotating device 2 and the At least one set of wheel module 5 is arranged between the second rotating device 3 , and the wheel module 5 adjusts the moving speed of the robot by setting the first electromagnetic damping motor 511 . In the solution of the present invention, the robot relies on the force of the fluid in the pipeline to move forward in the pipeline. By setting the first electromagnetic damping motor 511 on the wheel set module 5, ac...
Embodiment 2
[0047] Such as Figure 7-8 As shown, the difference from Embodiment 1 is that universal joints 7 are respectively provided between the two ends of the main shaft body 41 and the shaft support 11 in this embodiment, through which two or more The pipeline detection robot is connected end to end, thereby providing more detection functions and endurance functions, making the invention suitable for complex pipeline detection, and greatly improving the detection ability and adaptability.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More