

Squatting-type human lower limb joint biomimetic device
A technology of human body and joints, applied in the field of biomechanics, to achieve the effect of good effect, convenient use, good social and economic benefits
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The specific implementation manners of the present invention will be described in further detail below in conjunction with the accompanying drawings.
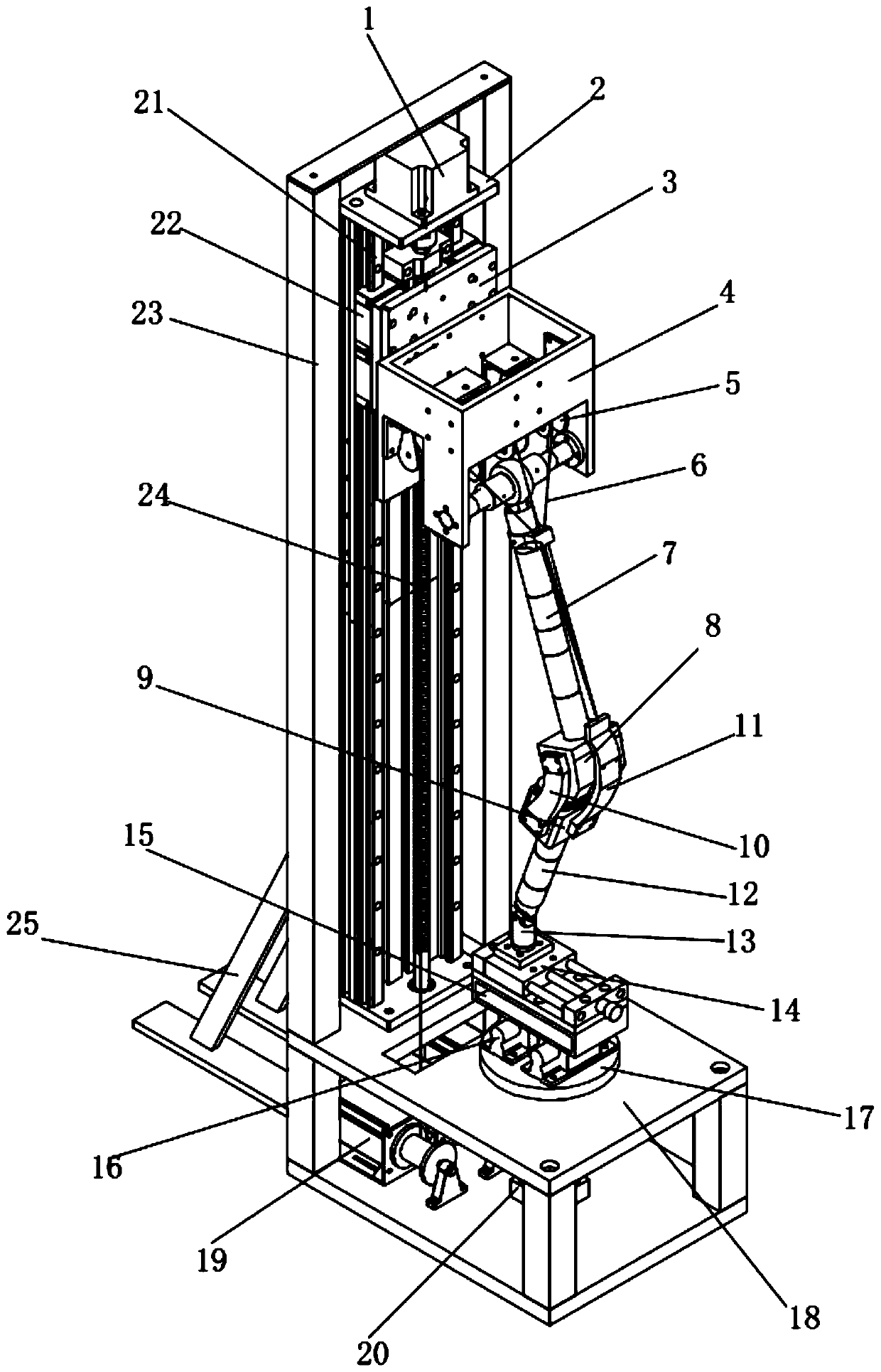
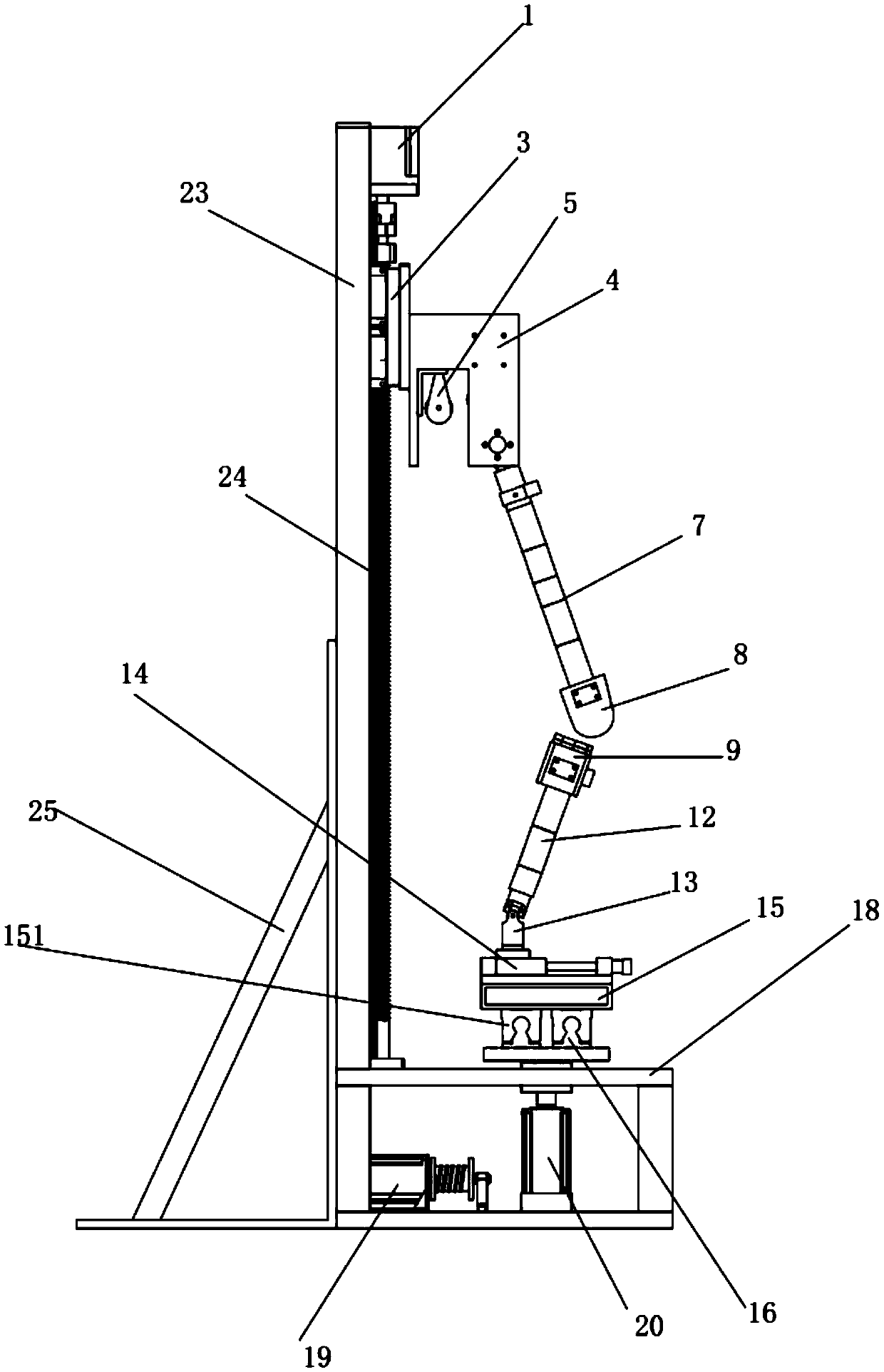
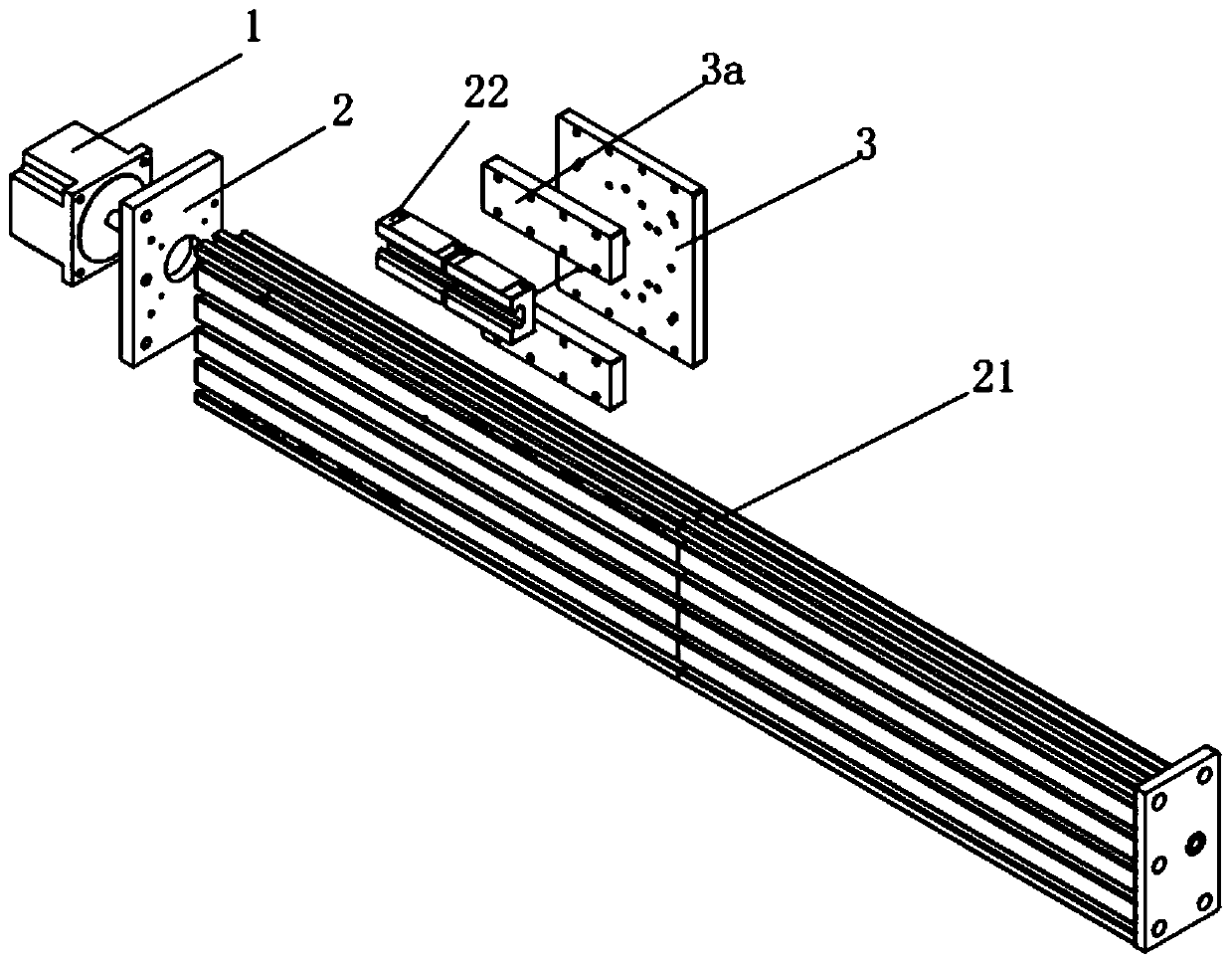
[0032] Depend on Figure 1-11 Given, the present invention comprises support, and support comprises base 18 and the vertical support plate 23 that is vertically arranged on one side of base 18, and vertical support plate 23 is provided with is driven by the first motor 1, along the height direction of vertical support plate. Slide table 4 that slides up and down or is fixed. A horizontal fixed shaft 41 is fixed on the slide table. The middle part of fixed shaft 41 is connected with femoral shaft 7 through the first universal joint, and the lower end of femoral shaft 7 is fixedly connected with femur lower end simulation block 8;
[0033] The base 18 is provided with a foot position adjustment mechanism, the foot position adjustment mechanism is connected with the tibial shaft 12 through the second universal joint 13, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More